Az optikai érzékelők optikai és elektronikai eszközök kombinációját használva jelzik a különböző objektumok – tárgyak, anyagok – jelenlétét. Tetszőleges anyagi minőségű tárgy jelenlétét érzékelik, néhány milliméteres közelségtől egészen néhány tíz méteres távolságig. A fotoelektromos érzékelők akkor reagálnak, ha a cél tárgy vagy megszakítja a kibocsátott fénysugár útját, vagy annak felületéről visszaverődik. A fényjel változásait az érzékelő a kimeneti állapotot vezérlő elektromos jelekké alakítja.
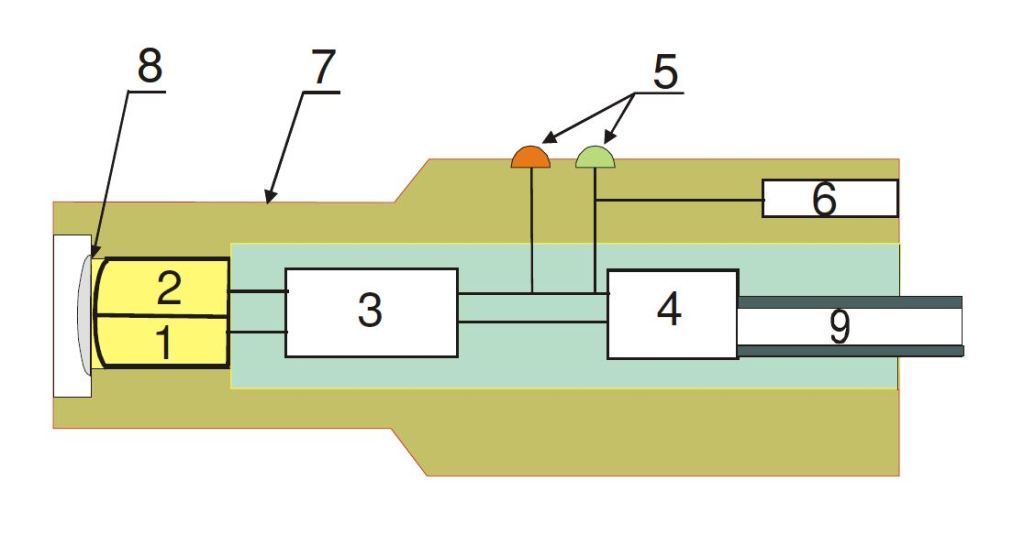
A fotoelektromos érzékelők a következő alkotóelemekből állnak: fényforrás (1), fény érzékelő (2), elektronikus áramkörök (3), kimeneti rendszer (4), LED (5) mely az érzékelő működési állapotáról ad felvilágosítást, az érzékenységet állító potenciométer (6), ház (7) és átlátszó árnyékolás 8, csatlakozó 9.
Átmenő sugaras érzékelők: Átmenő sugaras érzékelők esetén a fénysugár az adóból egyenesen a közös tengely mentén elhelyezett vevőbe kerül. Az ilyen érzékelők az adó és a vevő között megjelenő és a fénysugarat megszakító tárgyakat detektálják. Nagyban érzéketlenek a külső körülményekre, pl. a porra, a lencséket elhomályosító szennyeződésekre, gőzre vagy párára. Érzékelési távolságuk ( > 50 m) a különböző típusú szenzorokat összevetve a legnagyobb. Az ilyen érzékelők legfontosabb tulajdonsága, hogy tetszőleges anyag esetén működnek. A felület lehet festett, áttetsző, átlátszó, érdes, sima, fémes, műanyag, vagy szinte bármi más. A fénysugár mérete az adó és a vevő lencséjének átmérőjétől függ. Az érzékelő jelez, ha a céltárgy a sugár legalább 50%-át kitakarja.
Retro – reflexiós érzékelők: A retro-reflexiós érzékelők esetén az adó és a vevő egy házban helyezkedik el. A fény a vevőbe való visszaterelésére reflektort használunk. A fénysugár felé haladó tárgy a sugarat megszakítja, és kimeneti jelet generál. Az átlagos, polarizációs szűrő nélküli retro-reflexiós érzékelők az infravörös, a polarizációs szűrővel rendelkező modellek pedig a látható (általában vörös) tartományban működnek. Az ilyen érzékelők előnye nagy hatótávolságuk (kb. 12 m-ig) és a céltárgy felületi minőségével és színével szembeni érzéketlenségük. Ezen érzékelők használatához speciális reflektorra vagy felragasztható visszaverő lapokra van szükség. A közönséges tükörtől és más lapos visszaverő felületektől eltérően a reflektorokat nem kell az érzékelőhöz képest pontosan derékszögben elhelyezni, tehát néhány fokos pozicionálási hiba még nem befolyásolja az érzékelő működését.
Diffúz sugaras érzékelők: A diffúz sugaras érzékelőket gyakran reflexiós vagy közelítő érzékelőknek is nevezzük, és a céltárgyak közvetlen detektálására használatosak. Amellett, hogy az adó és a vevő egy házban helyezkedik el további előnye, hogy nincs szükség reflektora. Az adó fénysugarat bocsát ki, melyet a céltárgy viszszaver, és az így visszatér a vevőbe, és kimeneti jelet generál. A diffúz sugaras érzékelők működési tartománya relatív kicsi (kb. 100 mm-ig, ritkán 200 mm-ig). A nagyobb távolságban elhelyezkedő tárgyakat (vagy a hátteret) már nem tudják detektálni. A működési távolság bizonyos mértékben függ a céltárgy színétől és felületének minőségétől. A céltárgy tulajdonságaitól függően annak reflexiós tényezője széles skálán mozoghat. Fényes felületek még nagyobb távolságból is a fénysugár nagy részét visszaverik, azonban a megfelelő tárgy érzékelése okozhat problémákat.
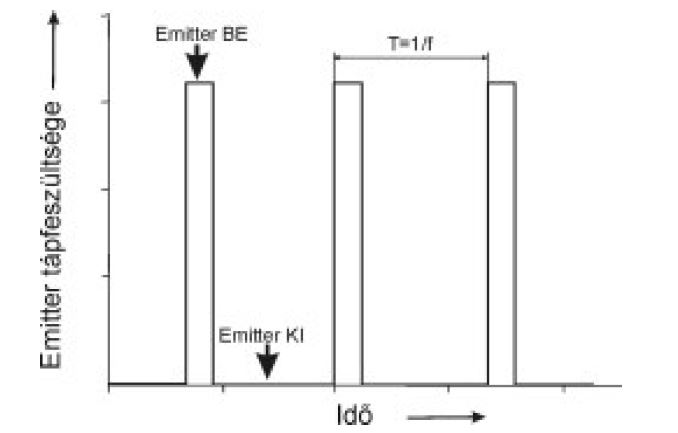
Működési elvükből kifolyólag a fotoelektromos érzékelők érzékenyek a természetes és mesterséges külső források által keltett interferenciával szemben. Külső forrásból származó fénysugarak nagyban befolyásolhatják az emitter által generált fényáram erősségét, mely a szenzor hibás működéséhez vezet. Ennek kiküszöbölése érdekében a szenzorok rendelkeznek olyan belső áramkörökkel, melyek kivágják az ilyen interferenciát és más zajokat is, valamint az érzékenységet is behangolják. A fotoelektromos érzékelők modulált fényt használnak, így relatív érzéketlenek a környezet fényviszonyaival szemben. A moduláció azt jelenti, hogy az adó fényforrása csak rövid, az impulzusok közötti szünetnél rövidebb időre kapcsol be. Az ily módon modulált fény frekvenciája a néhány kHz-es tartományban van. Ennek ellenére, ha az adó és a külső forrás hasonló frekvenciával működnek, interferencia léphet fel. A modulált fény használatának számos előnye van:
– az érzékelő kevésbé érzékeny a környezet fényeire,
– nő a szenzor érzékelési távolsága,
– csökken a keletkező hulladékhő mennyisége, ezzel nő a LED-ek élettartama.
A LED adók és vevők az emittált sugár és a vevő látómezejének szűkítésére optikai lencsékkel vannak felszerelve, így korlátozható a szenzor válaszadási tartománya mely csökkenti a tartományon kívüli háttértárgyakról való reflexió valószínűségét. Ezzel egy időben a fény fókuszálásával nagymértékben növelhető az adó és a vevő vagy a fényt visszaverő felület közötti távolság. Vannak olyan alkalmazások is, ahol széles látómezőre és kis érzékelési távolságra van szükség, ekkor a foto-optikai elemeket lencsék nélkül (mindössze egy sík, átlátszó ablakkal) használják.
Fénypolarizáció: A retro-reflexiv érzékelők alaptípusának kimeneti rendszere hibás választ generálhat, ha látóterében fénylő tárgy jelenik meg. A céltárgyról visszavert sugár és más fények megkülönböztetése érdekében szükség lehet polarizált fény használatára. A polarizáció a fényhullám rezgéseinek részleges vagy teljes rendezése. Ha a fény nem polarizált, az elektromos és mágneses mezők különböző irányokba mozoghatnak. Ezzel szemben a polarizált fény csak egy irányba rezeg.
Az ultrahangos érzékelőket az anyag minőségétől és színétől függetlenül átlátszó és nem átlátszó folyadékok szintjének meghatározására használják. Elsősorban nagy portartalmú, magas szennyezettségű helyeken alkalmazzuk őket, mivel itt optikai érzékelők nem használhatók. Az érzékelők egy ultrahang- váltóval működnek, mely ultrahang sugarat bocsát ki, majd méri az emittált és a sugár útjában elhelyezkedő tárgyról visszavert sugár érkezése között eltelt időt. Ez az idő arányos a szenzor és a tárgy közötti távolsággal. Az ilyen szenzorok átváltási frekvenciája, működési elvük miatt más szenzorokhoz képest alacsony (néhány Hz-től kb. 100 Hz-ig).
Az ultrahangos szenzorok akusztikus hullámokat hoznak létre, melyek frekvenciája (>20 KHz) kívül esik a hallható frekvenciákon. Az érzékelők magas működési frekvenciájuk miatt gyakorlatilag érzéketlenek a külső hangokból adódó interferenciával szemben. Az ilyen érzékelők az alábbi fő komponensekből épülnek fel: nagy feszültségű generátor, a szenzor fejében elhelyezkedő piezoelektromos konverter, jelfeldolgozó rendszer, kimeneti rendszer.
A hang terjedésének távolsága, eloszlása és sebessége részben a környezettől is függ. A közeg (levegő) fizikai tulajdonságainak véletlenszerű változásai befolyásolhatják a távolságmérés pontosságát. Ilyen környezeti változások lehetnek az alábbiak:
Hőmérséklet: alevegő hőmérsékletének változása megváltoztatja a hanghullám sebességét. A változás mértéke hozzávetőlegesen 17%/°K. A legtöbb érzékelő belső hőmérséklet kiegyenlítővel van ellátva, mely a hőmérséklet ingadozás hatását nagymértékben (kb. 2/3-ban) kiküszöböli.
Nyomás:Az atmoszférikus nyomás ±5%-os változása a hang sebességének ±6%-os változását eredményezi.
Páratartalom:A levegő páratartalmának növekedése a hang sebességének 2%-os változását eredményezi.
Légáramlatok:A légáramlatok hatása azok irányától és intenzitásától függ. Erős, 50 km/h-t meghaladó, a hang terjedésének irányában fújó szél számottevően befolyásolhatja a hang sebességét. A terjedés irányára merőleges szél a hanghullámokat eltérítheti, ami szintén negatív hatásnak számít.
Szennyeződés:A levegő nagymértékű szennyezettsége az ultrahang-emitter felületének elszennyeződéséhez vezet, ami az emittált hullám tartományát akár 30%-al is csökkentheti.
A hanghullám létrehozása: Az ultrahang-hullámokat jelátalakítók hozzák létre, melyek manapság leggyakrabban piezoelektromos elven működnek. A piezoelektromos hatás speciális kristályok esetén jön létre, melyekben nyomás/feszültség hatására elektromos töltések keletkeznek. Ha az átalakító kapcsolatban áll az anyaggal vagy valamely közeggel, azaz levegővel, a feszültségváltozások okozta vibrációt átadja a közeg részecskéinek, ahol hullám keletkezik. Fordított esetben, ha a közeg részecskéi rezgést adnak át az átalakítónak, a felület mechanikai deformációja következtében elektromos töltések keletkeznek. Ugyanazt az átalakítót tehát jelek létrehozására és fogadására is használhatjuk.
Ultrahang emitter és vevő
Az ultrahang-hullám terjedése során diszpergál. A legnagyobb hangenergia a szenzor tengelye köré koncentrálódik. Az igényektől függően különböző szenzorokat gyártanak, melyek nyílásszöge eltér. A szög néhány foktól néhány tíz fokig változhat. A sugár alakját és szögét a szenzor rezgő felülete határozza meg, így nagyon különböző sugarakat létrehozó szenzorokkal találkozhatunk.
Az ultrahangos érzékelők általában két üzemmód valamelyikében működnek: diffúz (diffúziós szenzor) vagy átmenő sugaras (detekciós szenzor). A céltárgyról visszavert ultrahang-sugár visszhang formájában visszatér a szenzorhoz. A kimenet típusától függően a detektor a visszatérési időből meghatározott távolságot analóg áram vagy feszültség jellé, illetve kétállású jelek esetén BE/KI jellé alakítja át. Amint a céltárgy elhagyja az érzékelési tartományt, a kimeneti rendszer visszatér eredeti állapotába. Az ultrahangos mérések tehát két szakaszból állnak:
Az átalakító ultrahang-sugarat küld a céltárgy felé.
A céltárgy ultrahang-sugarat küld az átalakító irányába, amikoris ez a sugár az eredeti jel visszhangja.
Diffúziós szenzorok esetén a két funkciót ugyanaz a piezoelektromos átalakító végzi.
A szenzor érzékenysége a detektálandó tárgy sűrűségének növekedésével nő. Minél nagyobb ugyanis a tárgy sűrűsége, a hanghullám annál nagyobb részét veri vissza.
A diffúziós szenzorok periodikus hang impulzusokat hoznak létre. Az impulzus kibocsátása és a visszaérkező hullám észlelése között eltelt idő arányos a tárgy és a szenzor távolságával. Két, azaz jel generátor és vevő funkciós átalakítóval rendelkez ő szenzorok esetén az impulzus Ti hosszának lényegesen rövidebbnek kell lennie, mint a visszhang megérkezéséhez szükséges idő Te. Az impulzusok néhány tíz Hz-es frekvenciával ismétlődnek. A szenzor az impulzus kiküldését követően azonnal készültségbe áll a visszatérő hullám fogadására, és a következő impulzus küldéséig ebben az állapotban is marad. A visszhang megérkezésének Te idejét mérve a céltárgy távolsága kiszámítható. Detekciós szenzorok esetén a visszhang észlelése az érzékelési tartományon belül elhelyezkedő céltárgy észlelését jelenti, így a kimeneti állapot megváltozását okozza.
Ultrahangos diffúz szenzorok speciális, elektronikusan vezérelt átalakítókat használnak, melyek a hanghullám-impulzust létrehozzák, és fogadják is. Az átalakító néhány mikroszekundumtól 1 milliszekundumig tartó időintervallum alatt impulzusok sorozatát bocsátja ki, majd vár azok a detektált tárgyról való visszavert hullámainak visszatérésére.
A szenzor maximális érzékelési távolságát egy megfelelő potenciométer segítségével korlátozni lehet, így az adott távolságon kívül elhelyezkedő tárgyakat nem észleljük. Ezáltal a háttér kivágása megoldható. Néhány szenzortípus esetén az érzékelési távolság alsó határa is beállítható, azaz létrehozható egy kizárt tartomány is. Ekkor az aktív tartomány pontosan meghatározható.
A szenzor frontfelületének közvetlen közelében egy holt tér található, itt nem észlelhetünk tárgyakat, illetve az észlelés kétséges. A holt tér mérete a szenzor méretétől és érzékelési távolságától függ.
Detekciós szenzorok esetén az ultrahangos átalakító egy hanghullámot indít egy önálló házban elhelyezkedő vevőegység irányába. A hanghullám útjában álló tárgy megtöri a hullámot, erre a szenzor kimeneti állapota átvált. Detekciós szenzorok esetén, a diffúz és reflexiós szenzorokkal ellentétben az átalakító folytonos jelet állít elő, így tehát nincs holt tér. Az ilyen szenzorokat nem csak a hangot visszaverő, hanem az azt elnyelő vagy disszipáló, porózus anyagok észlelésére alkalmazzák, de használhatjuk őket a diffúz sugaras szenzorok által nehezen észlelhető alakú tárgyak detektálására is.
Szenzorok szinkronizálása: Kettő vagy több szenzor megfelelő összekapcsolása lehetővé teszi egymás közelségében való elhelyezésüket interferencia veszélye nélkül. A szinkronizálás javasolt, ha a szenzorok azonos irányba bocsátanak ki hullámokat, és az ultrahang hullámok részlegesen átfedik egymást. Szinkronizálás esetén lehetséges, hogy a detektált tárgy az aktív szenzor és a vele szinkronizált szenzor előtt található, mégis csak az aktív szenzor kimenete változik meg. A szenzorok szinkronizálása érzéketlenné teszi őket az első visszhangon kívül érkező további jelekre, így más interferáló ultrahang hullámok hatása kiküszöbölhető A szinkronizált szenzorok egy időben bocsátanak ki jelet, és egy, kiterjesztett akusztikus kúppal rendelkező érzékelőként működnek, mely ugyanazt a tárgyat detektálja.
Speciális ultrahangos érzékelők
Reflexiós érzékelők: A retro reflexiós érzékelők működésének elve a detektált tárgyról és a reflektorról visszavert hanghullám visszatérési idejének különbségén alapszik. A reflektor szerepét tetszőleges kemény és sima felületű tárgy betöltheti. A detektálandó tárgyról viszszavert hanghullámnak hamarabb kell visszaérkeznie, mint a reflektorról visszavert hullámnak. Ekkor az érzékelő kimeneti állapota megváltozik. A reflexiós érzékelők bármely kemény felületről visszaverődő ultrahang-hullámot fel tudják használni. Az ilyen szenzorok különösen alkalmasak például vatta, szivacs, textíliák észlelésére, mivel ezek nagymértékben elnyelik a hanghullámot, valamint a szenzor tengelyére nem merőleges felületek detektálására is alkalmasak.
Két átalakítós érzékelők: Két átalakítós érzékelők egyszerre működhetnek diffúziós sugár és reflexiós üzemmódban. Ekkor az egyik átalakító emitterként, a másik pedig ultrahang vevőként működik. Ez az elrendezés lehetővé teszi a szenzorhoz nagyon közel elhelyezkedő céltárgyak észlelését is, mivel a vevőnek nem kell megvárnia, amíg az emitter kibocsátja a jelet. A két átalakítót azonban szinkronizálni kell.
Analóg kimenetű ultrahang érzékelők: Az ultrahangos érzékelők nagy része mind kétállapotú, mind analóg kimenettel is rendelkezik. Ha távolság mérésére van szükség, a feszültség vagy áram kimenetet használjuk. A kimeneti feszültség vagy áram nagysága arányos a mért távolsággal.
Alkalmazása
Az ultrahangos érzékelőket számos területen alkalmazzák, mivel érzéketlenek a mérési tartományban esetlegesen fellépő zavaró hatásokra és a szenzor elemeinek elszennyeződésére.
Ipari alkalmazások eseten ezeket az érzékelőket használhatjuk többek között az alábbiak megfigyelésére:
A piezoelektromosság olyan fizikai jelenség, melynek során bizonyos anyagokon (kristály, kerámia) összenyomás hatására elektromos polarizáció (töltésszétválasztás) lép fel. Így a mechanikai feszültségváltozás elektromos feszültséget hoz létre. A fordított effektus során elektromos feszültség hatására megváltozik az alakjuk. Ez utóbbi az inverz piezoelektromosság. A jelenség tehát megfordítható, ugyanabban az anyagban oda-vissza működik.
A Curie-fivérek 1880-ban figyelték meg, hogy egyes ásványi anyagok, mint pl. a kvarc, mechanikai feszültségi állapot hatására villamosan polarizálódnak és felületükön villamos töltést halmoznak fel. A piezoelektromos szenzoroknál nem áram, nem feszültség, hanem töltés keletkezik! Ezt kell megmérni. A piezoátalakítónak mindig van saját kapacitása is, ennek következtében az elektródákon egy feszültség is megjelenik (q = C·U). A töltések azonban előbb-utóbb elfogynak, így a feszültség is megszűnik. Ezért a cél nem a feszültség, hanem a töltésmennyiség megmérése.
Piezoelektromos anyagok: Számos igen előnyös tulajdonsága miatt piezoelektromos átalakítók céljára szinte kizárólag a kvarcot (SiO2), annak természetes vagy mesterséges formáját használják fel.
A kvarc előnyös tulajdonságai a következők:
nagy szilárdság
viszonylag nagy ellenálló-képesség hőmérsékleti hatásokkal szemben, mintegy 500 °-ig a piezoelektromos tényező alig változik
igen nagy szigetelési ellenállás
nagy linearitás, hiszterézis nélkül.
A kvarc szinte egyetlen hátránya, hogy maga a piezoelektromos effektus nem túl nagy. Ezért használunk olyan anyagokat, amelyeknél az effektus nagyobb, mint például a bárium-titanát, a Seignette-só vagy a PZT (ólom-cirkonát-titanát). Sajnos a nagyobb érzékenységnek ára van: ezek az anyagok nem annyira stabilak, és az effektus sokkal erősebben függ a környezeti feltételektől, pl. hőmérséklet, nedvesség. Ezért mérésre legtöbbször ma is a kvarcot választják.
A szimmetriaközépponttal nem rendelkező szerkezetű kristályos anyagokban a deformáció (rugalmas alakváltozás) hatására elektromos dipólusok keletkeznek, mert a pozitív és negatív töltésközéppontok különválnak, vagy a már meglévő dipólusok hossza megváltozik. A kristály szemben álló lapjain – a mechanikai feszültség keltette dipólusok rendeződése miatt – ellentétes előjelű elektromos töltések halmozódnak fel, ami elektromos feszültséget hoz létre. A deformáló erő irányváltozásakor az előjel felcserélődik, az elektromos tér és a feszültség is előjelet vált.
A fordított piezoelektromos jelenség akkor lép fel, ha a piezoelektromos kristály valamelyik kristálytengelyével egybeeső irányú elektromos térbe kerül. A térerősség irányától függően az elektromos tér hatására, annak irányától függően összehúzódik vagy megnyúlik. A méretváltozás az elektromos tér erősségének nagyságával arányos és irányfüggő.
Bizonyos piezoelektromos anyagok (pl. turmalin) hőmérséklet-változás hatására deformálódnak, ami ellentétes előjelű elektromos töltéseket hoz létre a megfelelő határfelületeken, ez a jelenség a piroelektromosság.
A piezoelektromos szenzorok tulajdonságai: Tekintettel arra, hogy a piezoelektromos effektussal létrehozott töltések előbb-utóbb elfogynak, elszivárognak, kiegyenlítődnek, a piezoelektromos jelátalakítókkal nem lehet statikus mérést végezni. Ezek elsősorban a dinamikus mérések eszközei.
A piezoelektromos elven működő szenzorokra jellemző az igen éles, rezonanciafrekvencián jelentkező erősítéstöbblet és a kis frekvenciákon eltűnő érzékenység, ami tulajdonképpen azt jelenti, hogy a piezoszenzorokat nem lehet statikus mérésekre használni.
Piezoelektromos gyorsulásmérő
A piezoelektromos szenzorokat legtöbbször gyorsulásmérőnek, ritkábban erő- vagy nyomásmérőnek használják.
Az induktív érzékelők (szenzorok) az automatizálásban a helyzet és a transzlációs mozgás ellenőrzésére és vezérlésére leginkább elterjedt érzékelők. Sok alkalmazás esetén ez a szenzor a legjobb választás, hiszen egyszerű és kompakt felépítése mellett nagy megbízhatóság és egyszerű beszerelhetőség jellemzi. Az induktív érzékelők olyan jelátalakítók, melyek kimenetük állapotváltozásával jelzik fémes tárgyak jelenlétét érzékelési területükön belül, anélkül hogy direkt kontaktus alakulna ki.
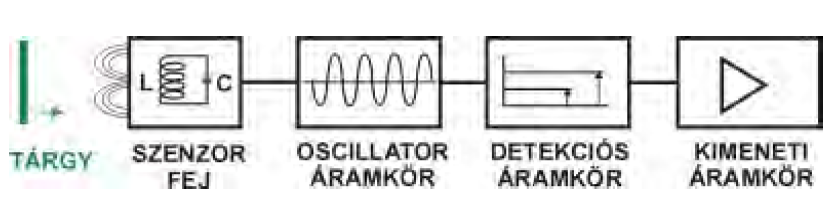
Egy induktív szenzor az alábbi alapvető építőelemekből áll: vasmagos indukciós tekercset tartalmazó fej, szinuszos feszültséget kibocsátó jelgenerátor, érzékelő rendszer (komparátor) és egy kimeneti erősítő.
Induktív szenzor felépítése
A tekercsből és vasmagból álló indukciós rezgőkör egy változó, nagy frekvenciás mágneses teret indukál a szenzor körül. Ez a mező bármely, a szenzor közelében levő fémes tárgyban örvényáramokat hoz létre. Ezek az örvényáramok az induktív áramkör terhelését okozzák, melynek eredménye a rezgési amplitúdó csökkenése. A változás mértéke a fémes tárgy és a szenzor távolságának függvénye. A szenzor kimenetének megváltozása annak karakterisztikájától függően a fémes tárgy egy adott távolságon belül történő elhelyezkedése esetén következik be. Analóg szenzorok esetén a kimeneti jel szintje fordítottan arányos a tárgy szenzortól való távolságával.
Alapkonstrukció: Az induktív szenzor aktív része egy vasmagra tekert, változó mágneses terű tekercs. A mag szerepe nyitott mágneses kör esetén a tekercs mágneses mezejének felerősítése, és annak a mérési terület felé irányítása. A mágneses mező változása mindig elektromos mező keletkezését vonja maga után (örvényáram). Ha a változó mágneses mezőben egy vezető jelenik meg, az elektromos mező erővonalai mentén örvényszerű mágneses mező keletkezik. Ez a mező ellentétes a tekercs mágneses mezejével, és elveszi a rezonancia-kör energiájának egy részét. Ez azt jelenti, hogy a rezonancia-kör veszteségeiben változás lép fel, ami befolyásolja a minőségi faktort és a rezgés amplitúdója csillapodik. A csillapítás addig lép fel, amíg a vezető tárgy ki van téve a tekercs mágneses mezejének. Ha a tárgyat eltávolítjuk a mezőből, a rezonancia csillapítása megszűnik, és a rezgés amplitúdója visszatér kiindulási értékére.
Induktív érzékelők felépítése
A szenzor elektromos áramköre az amplitúdó csillapodása alapján meghatározza a tárgytól való távolságot, és létrehozza a kimeneti jelet. A kimeneti jel általában kétállapotú annak függvényében, hogy a tárgy a szenzor munkaterületén belül vagy kívül helyezkedik el. Előfordulhat azonban analóg jel is, mely fordítottan arányos a tárgy szenzortól mért távolságával.
Az átlagos induktív szenzorok mérési területe nem haladja meg a 60 mm-t. A szenzorok háza eltérő lehet, léteznek hengeres (fém) és prizmás (műanyag) házak, így a szenzor a működési helyre optimálisan szerelhető be.
Az induktív tekercs által létrehozott mágneses tér fluxusa egy adott korlátolt területet fed le, mely behatárolja a szenzor működési terültét. A szenzor előlapjától a tárgynak az áramkör átváltását előidéző távolságát névleges érzékelési távolságnak (Sn) nevezzük. Ez az érték szerepel a katalógusokban.
A valós érzékelési távolság (Sr) a gyártás során határozzák meg, és némileg eltérhet a névleges érzékelési távolságtól. Néveleges érzékelési feszültség és nominális környezeti hőmérséklet esetén 0,9 Sn<Sr<1,1Sn. A szenzor működésének megbízhatósága növelése érdekében az ajánlott működési tartomány tovább csökken: az üzemi érzékelési távolság Sa<0,8<Sn. Ez a távolság a fémes tárgytól való azon biztonságos távolságnak felel meg, mely esetén a külső hőmérséklet és a hálózati feszültség teljes változási tartománya esetén is hibátlan működés garantálható.
A szenzor Sn névleges érzékelési távolsága függ a ház D átmérőjétől, pontosabban a tekercs átmérőjétől és a mag tulajdonságaitól. Így tehát kisebb házba beépített szenzorok működési tartománya kisebb, mint a nagyobb méretű szenzoroké. Léteznek azonban speciális típusok, melyek növelik a működési tartományt.
Redukciós tényezők: A detektált tárgy az áramkör rezonanciáját anyagától függő mértékben csillapítja. Az arany, réz vagy alumínium, melyek elektromos vezetőképessége nagyobb az St37–es acélnál, a rezgést kisebb mértékben csillapítják. Ezek a változások a tárgy szenzortól való távolságának megváltoztatásával kompenzálhatók, ez azonban az érzékelési tartomány csökkenéséhez vezet.
A szenzor tervezése annak érzékenységére is hatással van.
Hengeres házban két alaptípus létezik:
– Árnyékolt: a rezonáns áramkör induktív tekercse egy köpenyen belül helyezkedik el, mégpedig úgy, hogy a köpeny fémes frontális felülete a szenzor frontális része.
– Árnyékolatlan: A tekercs kinyúlik a házból, és egy kiegészítő műanyag sapka védi.
A kinyúló tekercses szenzorok érzékenysége a detektálandó tárgy irányába nagyobb, azonban ezáltal a környező tárgyakat is jobban érzékeli.
Érzékelési távolságok
Szerelés: Az összeszerelési előírások betartása lehetővé teszik a környezet csillapító hatásából vagy több szenzor egymásra hatásából származó interferencia elkerülését. A szenzor közelében előírt szabad zóna mérete és alakja az érzékelési távolságtól, a tervezés módjától és a detektálandó tárgy méretétől függ.
A hengeres, fémes köpenyű ház a behelyezhető mag és az indukciós tekercs méretét közvetlenül befolyásolja. Ennek következtében szoros összefüggés áll fenn a ház átmérője, és az érzékelési távolság és a szükséges szabad tartomány között, ahol az érzékelendő tárgyon kívül más fémes tárgy nem helyezkedhet el. Az árnyékolt szenzorok működési tartománya nagyobb az árnyékolatlan szenzorokénál, tehát a szükséges szabad zóna is nagyobb.
Az árnyékolt hengeres szenzor nem érzékeny az őt körülvevő fémes tárgyakra, csak a közvetlenül előtte elhelyezett tárgyakat észleli. Ennek eredményeként ezeket a szenzorokat fémes elemek közé is beszerelhetjük. A szenzor frontális felületétől számítva a szabad tartomány 3Sn. Két, egymáshoz közel elhelyezkedő szenzor kölcsönös egymásra hatásának elkerülésére a köztük levő távolság legyen legalább az egyik szenzor D átmérőjének kétszerese.
Az árnyékolatlan hengeres szenzor érzékeny az őt körülvevő fémes tárgyakra, tehát a szabad terület oldalirányba is kiterjed, itt sem helyezkedhet el más tárgy. Az interferencia elkerülése végett a két szenzor távolsága itt legalább a D átmérő háromszorosa legyen.
Induktív szenzorok beszerelése
Alkalmazások:
Fúrófej törésének ellenőrzése.
Szállítószalagon áthaladó tárgyak érzékelése.
Drót folytonosságának ellenőrzése.
Speciális szenzorok
Gyűrű-érzékelők: Induktív gyűrű-érzékelők esetén az érzékelési tartomány a szenzor gyűrű alakú házának belsejében található. Az érzékelőt úgy tervezték, hogy a furaton áthaladó tárgyakat észlelje.
Alakjukat figyelembe véve ezek az érzékelők a furaton áthaladó kis, fémes tárgyak, pl. csapok, szegek, csavarok számlálására alkalmasak. Az ilyen érzékelők háza általában műanyagból készül. Az ilyen érzékelők működése egy nagy frekvenciás generátoron alapszik, mely a furaton belül mágneses teret hoz létre. A tekercs toroidja nagy teljesítményű maggal rendelkezik, mely minőségi faktora jobb, mint a vasmagos tekercseké. Tetszőleges fémes tárgy jelenléte a rezgések amplitúdójának csökkentésén keresztül aktiválja a szenzort. Az amplitúdó-csökkenést egy komparátor ismeri fel, majd egy küszöb érték átlépésekor átvált a kimeneti állapotra. Az érzékelő működési tartománya a furat átmérőjétől, és az érzékelendő fém méretétől és fajtájától függ.
A szenzor aktiválásához a csillapítás egy adott szintje szükséges. Ha az érzékelendő tárgyak túl kicsik, elképzelhető, hogy a csillapítás mértéke is túl csekély lesz. Érthető tehát, hogy minden szenzorméret esetén létezik egy minimális hossz vagy átmérő, ami felett az érzékelendő tárgy biztos felismerése garantálható. A gyűrű-érzékelő előnye, hogy az érzékelendő tárgyak mozgási pályáinak nem kell szükségszerűen azonosnak lenniük. A gyűrű kialakítás lehetővé teszi a térbeli orientációtól független érzékelést.
Mágneses térre érzéketlen szenzorok: A nagy áramot igénylő hegesztési eljárások igen erős mágneses mezőt generálnak. Az induktív érzékelők ilyen területen való használata a kimenti állapot kontrollálatlan viselkedésének veszélyével jár, mely a mágneses mező a mag szaturációs intenzitására kifejtett hatás a következménye. Az erős mágneses terek másik negatív hatása a tekercsben a további áram indukciója. Ez az áram zavarja az oszcillátor működését és a kimeneti állapot véletlenszerű átkapcsolásához vezethet. Mindemellett a hegesztési eljárást rengeteg szikra kíséri, mely a ház és az aktív felület károsíthatja.
A szikrák miatt az ilyen alkalmazásokra tervezett szenzorok teflon, bronz bevonatúak, mellső felületük pedig hőálló műanyaggal védett. A hibás működés elkerülése végett ezek az érzékelők különleges elektronikus áramkörrel és kis mágneses permeabilitású maggal rendelkeznek. Az ilyen, speciális szinterelt vasból készült magokat csak a tipikus vasmagokénál sokszorosan sű- rűbb mágneses mező szaturál. Tehát az ilyen maggal rendelkező szenzorok sokkal kevésbé érzékenyek a külső interferenciára, mivel saját mágneses terük koncentrált és irányított. A külső mágneses mezőkkel szemben a mag nélküli szenzorok a legkevésbé érzékenyek. A mag nélküli berendezések esetén a tekercs nem mágneses, műanyag orsóra van feltekerve.
Különleges körülményekre tervezett szenzorok: A szokványos szenzorok nem szokványos mködési körülmények közötti használata működési hibákat vagy akár tartós károsodást is okozhat. Az érzékelők különleges körülményekre való adaptálásához általában a ház különleges anyagból való elkészítése, a méretek növelése, a speciális összeszerelési eljárások alkalmazása, és védelmük kialakításánál a tervezési változtatásokkal az elektromos áramkörök működési körülményeinek biztosítása szükséges.
A gyártók a kereslet alapján különböző különleges körülmények között működő szenzort kínálnak. Ilyenek például:
a 200°C feletti hőmérsékletet tűrő érzékelők
kémiailag ellenálló,
olajra érzéketlen,
magas páratartalomra érzéketlen szenzorok
3-5 mm fejátmérőjű miniatűr érzékelők
A nagy nyomású környezetben működő szenzor felépítésénél a belső elektronika védelme érdekében az érzékelőnek robusztusnak és jól tömítettnek kell lennie.
NAMUR szenzorok: A NAMUR induktív szenzorok olyan két vezetékes érzékelők, melyek belső ellenállása fémes tárgy érzékelésekor megváltozik: a „nincs fémes tárgy” állapothoz kicsi, a „fémes tárgy detektálva” állapothoz pedig nagy ellenállás tartozik. Ezek az érzékelők külső erősítőkkel működnek.
A NAMUR induktív érzékelők egy részlegesen csillapított tekerccsel rendelkező oszcillátorból és egy demodulátorból állnak. Az érzékelt tárgy és a szenzor távolságának változása a kimenő áram változásává alakul, melyet a külső erősítő kétállapotú jellé alakít. A 0,15 mA-t meg nem haladó áramot a külső erősítő „nincs jel” állapotként értelmezi, a 6 mA-nél nagyobb áramokat pedig rövidzárlatként.
Analóg induktív szenzorok: A hagyományos érzékelőkkel ellentétben, melyek csak az érzékelést vagy nem-érzékelést regisztrálják, az analóg kimenetű induktív szenzorok teljes mérési tartományukon belül képesek egy tárgy helyzetének meghatározására. Egy tárgy távolságának Sn-ről nullára való változása a kimeneti jel 0-ról 20 mA-re való változásának felel meg. Az analóg kimeneti jelű szenzorok a közelítésérzékelőkhöz hasonlóan működnek. A rezonancia áramkör által létrehozott változó mágneses mezőt a szenzor érzékelési távolságán belül jelenlévő fémes tárgy csillapítja. A csillapítás a tárgy szenzorhoz való közeledésével erősödik.
A jelenleg kapható érzékelők legtöbbje gyakorlatilag a teljes mérési tartományban lineáris karakterisztikával rendelkeznek.