
Az induktív érzékelők (szenzorok) az automatizálásban a helyzet és a transzlációs mozgás ellenőrzésére és vezérlésére leginkább elterjedt érzékelők. Sok alkalmazás esetén ez a szenzor a legjobb választás, hiszen egyszerű és kompakt felépítése mellett nagy megbízhatóság és egyszerű beszerelhetőség jellemzi. Az induktív érzékelők olyan jelátalakítók, melyek kimenetük állapotváltozásával jelzik fémes tárgyak jelenlétét érzékelési területükön belül, anélkül hogy direkt kontaktus alakulna ki.
Egy induktív szenzor az alábbi alapvető építőelemekből áll: vasmagos indukciós tekercset tartalmazó fej, szinuszos feszültséget kibocsátó jelgenerátor, érzékelő rendszer (komparátor) és egy kimeneti erősítő.
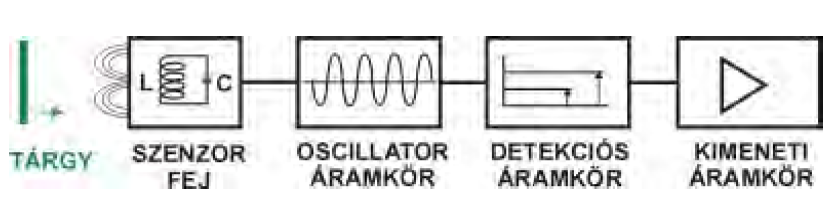
A tekercsből és vasmagból álló indukciós rezgőkör egy változó, nagy frekvenciás mágneses teret indukál a szenzor körül. Ez a mező bármely, a szenzor közelében levő fémes tárgyban örvényáramokat hoz létre. Ezek az örvényáramok az induktív áramkör terhelését okozzák, melynek eredménye a rezgési amplitúdó csökkenése. A változás mértéke a fémes tárgy és a szenzor távolságának függvénye. A szenzor kimenetének megváltozása annak karakterisztikájától függően a fémes tárgy egy adott távolságon belül történő elhelyezkedése esetén következik be. Analóg szenzorok esetén a kimeneti jel szintje fordítottan arányos a tárgy szenzortól való távolságával.
Alapkonstrukció: Az induktív szenzor aktív része egy vasmagra tekert, változó mágneses terű tekercs. A mag szerepe nyitott mágneses kör esetén a tekercs mágneses mezejének felerősítése, és annak a mérési terület felé irányítása. A mágneses mező változása mindig elektromos mező keletkezését vonja maga után (örvényáram). Ha a változó mágneses mezőben egy vezető jelenik meg, az elektromos mező erővonalai mentén örvényszerű mágneses mező keletkezik. Ez a mező ellentétes a tekercs mágneses mezejével, és elveszi a rezonancia-kör energiájának egy részét. Ez azt jelenti, hogy a rezonancia-kör veszteségeiben változás lép fel, ami befolyásolja a minőségi faktort és a rezgés amplitúdója csillapodik. A csillapítás addig lép fel, amíg a vezető tárgy ki van téve a tekercs mágneses mezejének. Ha a tárgyat eltávolítjuk a mezőből, a rezonancia csillapítása megszűnik, és a rezgés amplitúdója visszatér kiindulási értékére.

A szenzor elektromos áramköre az amplitúdó csillapodása alapján meghatározza a tárgytól való távolságot, és létrehozza a kimeneti jelet. A kimeneti jel általában kétállapotú annak függvényében, hogy a tárgy a szenzor munkaterületén belül vagy kívül helyezkedik el. Előfordulhat azonban analóg jel is, mely fordítottan arányos a tárgy szenzortól mért távolságával.
Az átlagos induktív szenzorok mérési területe nem haladja meg a 60 mm-t. A szenzorok háza eltérő lehet, léteznek hengeres (fém) és prizmás (műanyag) házak, így a szenzor a működési helyre optimálisan szerelhető be.
Az induktív tekercs által létrehozott mágneses tér fluxusa egy adott korlátolt területet fed le, mely behatárolja a szenzor működési terültét. A szenzor előlapjától a tárgynak az áramkör átváltását előidéző távolságát névleges érzékelési távolságnak (Sn) nevezzük. Ez az érték szerepel a katalógusokban.
A valós érzékelési távolság (Sr) a gyártás során határozzák meg, és némileg eltérhet a névleges érzékelési távolságtól. Néveleges érzékelési feszültség és nominális környezeti hőmérséklet esetén 0,9 Sn<Sr<1,1Sn. A szenzor működésének megbízhatósága növelése érdekében az ajánlott működési tartomány tovább csökken: az üzemi érzékelési távolság Sa<0,8<Sn. Ez a távolság a fémes tárgytól való azon biztonságos távolságnak felel meg, mely esetén a külső hőmérséklet és a hálózati feszültség teljes változási tartománya esetén is hibátlan működés garantálható.
A szenzor Sn névleges érzékelési távolsága függ a ház D átmérőjétől, pontosabban a tekercs átmérőjétől és a mag tulajdonságaitól. Így tehát kisebb házba beépített szenzorok működési tartománya kisebb, mint a nagyobb méretű szenzoroké. Léteznek azonban speciális típusok, melyek növelik a működési tartományt.

Redukciós tényezők: A detektált tárgy az áramkör rezonanciáját anyagától függő mértékben csillapítja. Az arany, réz vagy alumínium, melyek elektromos vezetőképessége nagyobb az St37–es acélnál, a rezgést kisebb mértékben csillapítják. Ezek a változások a tárgy szenzortól való távolságának megváltoztatásával kompenzálhatók, ez azonban az érzékelési tartomány csökkenéséhez vezet.
A szenzor tervezése annak érzékenységére is hatással van.
Hengeres házban két alaptípus létezik:
– Árnyékolt: a rezonáns áramkör induktív tekercse egy köpenyen belül helyezkedik el, mégpedig úgy, hogy a köpeny fémes frontális felülete a szenzor frontális része.
– Árnyékolatlan: A tekercs kinyúlik a házból, és egy kiegészítő műanyag sapka védi.
A kinyúló tekercses szenzorok érzékenysége a detektálandó tárgy irányába nagyobb, azonban ezáltal a környező tárgyakat is jobban érzékeli.

Szerelés: Az összeszerelési előírások betartása lehetővé teszik a környezet csillapító hatásából vagy több szenzor egymásra hatásából származó interferencia elkerülését. A szenzor közelében előírt szabad zóna mérete és alakja az érzékelési távolságtól, a tervezés módjától és a detektálandó tárgy méretétől függ.
A hengeres, fémes köpenyű ház a behelyezhető mag és az indukciós tekercs méretét közvetlenül befolyásolja. Ennek következtében szoros összefüggés áll fenn a ház átmérője, és az érzékelési távolság és a szükséges szabad tartomány között, ahol az érzékelendő tárgyon kívül más fémes tárgy nem helyezkedhet el. Az árnyékolt szenzorok működési tartománya nagyobb az árnyékolatlan szenzorokénál, tehát a szükséges szabad zóna is nagyobb.
Az árnyékolt hengeres szenzor nem érzékeny az őt körülvevő fémes tárgyakra, csak a közvetlenül előtte elhelyezett tárgyakat észleli. Ennek eredményeként ezeket a szenzorokat fémes elemek közé is beszerelhetjük. A szenzor frontális felületétől számítva a szabad tartomány 3Sn. Két, egymáshoz közel elhelyezkedő szenzor kölcsönös egymásra hatásának elkerülésére a köztük levő távolság legyen legalább az egyik szenzor D átmérőjének kétszerese.
Az árnyékolatlan hengeres szenzor érzékeny az őt körülvevő fémes tárgyakra, tehát a szabad terület oldalirányba is kiterjed, itt sem helyezkedhet el más tárgy. Az interferencia elkerülése végett a két szenzor távolsága itt legalább a D átmérő háromszorosa legyen.

Alkalmazások:
- Fúrófej törésének ellenőrzése.
- Szállítószalagon áthaladó tárgyak érzékelése.
- Drót folytonosságának ellenőrzése.
Speciális szenzorok
Gyűrű-érzékelők: Induktív gyűrű-érzékelők esetén az érzékelési tartomány a szenzor gyűrű alakú házának belsejében található. Az érzékelőt úgy tervezték, hogy a furaton áthaladó tárgyakat észlelje.
Alakjukat figyelembe véve ezek az érzékelők a furaton áthaladó kis, fémes tárgyak, pl. csapok, szegek, csavarok számlálására alkalmasak. Az ilyen érzékelők háza általában műanyagból készül. Az ilyen érzékelők működése egy nagy frekvenciás generátoron alapszik, mely a furaton belül mágneses teret hoz létre. A tekercs toroidja nagy teljesítményű maggal rendelkezik, mely minőségi faktora jobb, mint a vasmagos tekercseké. Tetszőleges fémes tárgy jelenléte a rezgések amplitúdójának csökkentésén keresztül aktiválja a szenzort. Az amplitúdó-csökkenést egy komparátor ismeri fel, majd egy küszöb érték átlépésekor átvált a kimeneti állapotra. Az érzékelő működési tartománya a furat átmérőjétől, és az érzékelendő fém méretétől és fajtájától függ.

A szenzor aktiválásához a csillapítás egy adott szintje szükséges. Ha az érzékelendő tárgyak túl kicsik, elképzelhető, hogy a csillapítás mértéke is túl csekély lesz. Érthető tehát, hogy minden szenzorméret esetén létezik egy minimális hossz vagy átmérő, ami felett az érzékelendő tárgy biztos felismerése garantálható. A gyűrű-érzékelő előnye, hogy az érzékelendő tárgyak mozgási pályáinak nem kell szükségszerűen azonosnak lenniük. A gyűrű kialakítás lehetővé teszi a térbeli orientációtól független érzékelést.
Mágneses térre érzéketlen szenzorok: A nagy áramot igénylő hegesztési eljárások igen erős mágneses mezőt generálnak. Az induktív érzékelők ilyen területen való használata a kimenti állapot kontrollálatlan viselkedésének veszélyével jár, mely a mágneses mező a mag szaturációs intenzitására kifejtett hatás a következménye. Az erős mágneses terek másik negatív hatása a tekercsben a további áram indukciója. Ez az áram zavarja az oszcillátor működését és a kimeneti állapot véletlenszerű átkapcsolásához vezethet. Mindemellett a hegesztési eljárást rengeteg szikra kíséri, mely a ház és az aktív felület károsíthatja.
A szikrák miatt az ilyen alkalmazásokra tervezett szenzorok teflon, bronz bevonatúak, mellső felületük pedig hőálló műanyaggal védett. A hibás működés elkerülése végett ezek az érzékelők különleges elektronikus áramkörrel és kis mágneses permeabilitású maggal rendelkeznek. Az ilyen, speciális szinterelt vasból készült magokat csak a tipikus vasmagokénál sokszorosan sű- rűbb mágneses mező szaturál. Tehát az ilyen maggal rendelkező szenzorok sokkal kevésbé érzékenyek a külső interferenciára, mivel saját mágneses terük koncentrált és irányított. A külső mágneses mezőkkel szemben a mag nélküli szenzorok a legkevésbé érzékenyek. A mag nélküli berendezések esetén a tekercs nem mágneses, műanyag orsóra van feltekerve.

Különleges körülményekre tervezett szenzorok: A szokványos szenzorok nem szokványos mködési körülmények közötti használata működési hibákat vagy akár tartós károsodást is okozhat. Az érzékelők különleges körülményekre való adaptálásához általában a ház különleges anyagból való elkészítése, a méretek növelése, a speciális összeszerelési eljárások alkalmazása, és védelmük kialakításánál a tervezési változtatásokkal az elektromos áramkörök működési körülményeinek biztosítása szükséges.
A gyártók a kereslet alapján különböző különleges körülmények között működő szenzort kínálnak. Ilyenek például:
- a 200°C feletti hőmérsékletet tűrő érzékelők
- kémiailag ellenálló,
- olajra érzéketlen,
- magas páratartalomra érzéketlen szenzorok
- 3-5 mm fejátmérőjű miniatűr érzékelők
- A nagy nyomású környezetben működő szenzor felépítésénél a belső elektronika védelme érdekében az érzékelőnek robusztusnak és jól tömítettnek kell lennie.
NAMUR szenzorok: A NAMUR induktív szenzorok olyan két vezetékes érzékelők, melyek belső ellenállása fémes tárgy érzékelésekor megváltozik: a „nincs fémes tárgy” állapothoz kicsi, a „fémes tárgy detektálva” állapothoz pedig nagy ellenállás tartozik. Ezek az érzékelők külső erősítőkkel működnek.
A NAMUR induktív érzékelők egy részlegesen csillapított tekerccsel rendelkező oszcillátorból és egy demodulátorból állnak. Az érzékelt tárgy és a szenzor távolságának változása a kimenő áram változásává alakul, melyet a külső erősítő kétállapotú jellé alakít. A 0,15 mA-t meg nem haladó áramot a külső erősítő „nincs jel” állapotként értelmezi, a 6 mA-nél nagyobb áramokat pedig rövidzárlatként.
Analóg induktív szenzorok: A hagyományos érzékelőkkel ellentétben, melyek csak az érzékelést vagy nem-érzékelést regisztrálják, az analóg kimenetű induktív szenzorok teljes mérési tartományukon belül képesek egy tárgy helyzetének meghatározására. Egy tárgy távolságának Sn-ről nullára való változása a kimeneti jel 0-ról 20 mA-re való változásának felel meg. Az analóg kimeneti jelű szenzorok a közelítésérzékelőkhöz hasonlóan működnek. A rezonancia áramkör által létrehozott változó mágneses mezőt a szenzor érzékelési távolságán belül jelenlévő fémes tárgy csillapítja. A csillapítás a tárgy szenzorhoz való közeledésével erősödik.
A jelenleg kapható érzékelők legtöbbje gyakorlatilag a teljes mérési tartományban lineáris karakterisztikával rendelkeznek.

