A robotirányítási rendszer magába foglalja a robotot, a robot irányítószoftverét, számítástechnikai eszközt amin a szoftver fut, a számítástechnikai eszközt és robotot összekapcsoló vezérlőberendezést.
A vezérlőberendezés felelős a robot meghajtásáért és az érzékelők jeleinek feldolgozásáért.
A robotirányító szoftver tartalmaz egy kommunikációs interfészt a felhasználó felé. A felhasználó egy robotprogramozási nyelv segítségével írja le a robotnak a feladatot. Meghatározza a robot előírt mozgását (pályatervezés) és a robot beavatkozóinak a vezérlőjeleit.
A robotok jellemzői: Az ipari robotok jellemzői szabványokban vannak rögzítve. Ezeket a jellemzőket a gyártónak meg adni.
Munkatér (WS)
Hasznos tömeg (payload): A robot által mozgatott tárgy vagy szerszám megengedett tömege.
Felbontás (resolution): A legkisebb távolság vagy szög amit a csukló vagy végberendezés meg tud tenni.
Pozicionálási pontosság (position accuracy): A robot több kiinduló pontból megközelít egy előírt pozíciót. Az átlagos megérkezési pozíció és a célpozíció közötti távolság.
Pozíció ismételhetőség (position repeatability): Az átlagos megérkezési pozíció és a legtávolabbi megérkezési pozíció közötti távolság.
Ipari robotok esetében az ismételhetőség és pontosság 0,1-0,01 mm tartományban van. Fontos jellemző még a csuklók által elérhető maximális sebesség.
Az érzékelő vagy szenzor olyan elem, amely egy mérendő tulajdonságtól függő jelet szolgáltat. A mérendő tulajdonság és a jel lehet fizikai, kémiai és biológiai jellegű.
Az érzékelők feladata a döntéshez szükséges információk szolgáltatása a vezérlőegységnek. Az érzékelők a fizikai mennyiséget valamilyen jól továbbítható jellé alakítják.
Az érzékelőket a ki- és bemeneti mennyiségei szerint csoportosítjuk. A kimeneti mennyiség lehet: villamos, pneumatikus, hidraulikus. A villamos érzékelő a mennyiséget villamosan feldolgozható jellé alakítja, a pneumatikus és hidraulikus érzékelők a jelet nyomássá alakítják.
A másik felosztás az érzékelt vagy mérendő mennyiségtől függ: térbeli helyzet (pozíció), mozgás (sebesség, elmozdulás, fordulatszám, gyorsulás), hang, fény, rádióhullámok, atomi sugárzás (röntgen-, gammasugárzás), hőmérséklet, erő (nyomás), feszültségkülönbség.
Érzékelők fajtái:
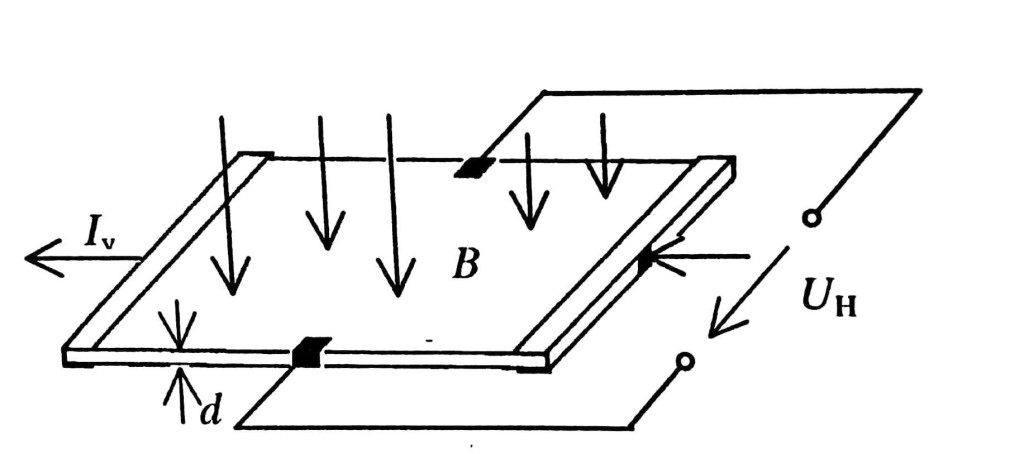
Mágneses tér érzékelése: Ezek érintés nélküli érzékelők. A mágneses térérzékelőkben félvezető lapka van, amely a mágneses erővonalakra merőlegesen van elhelyezve. A lapkán állandó értékű áram áramlik keresztül és így a mágneses térben jutva le lehet mérni a mágneses tér indukcióját.
Fényérzékelők: A fényérzékelők a megvilágítás hatására villamos jellemzőiket megváltoztató eszközök. A fotocellákban a fény hatására kibocsátódó elektronokat érzékelik. Más fotóérzékelőkben a fény hatására többlettöltés-hordozók keletkeznek, amelyek feszültség forrásként vagy ellenállás változtatásként lehetővé teszik a fény érzékelését.
Fotocella
A fényérzékelő legfontosabb jellemzője az érzékenység, milyen erős fényt tud érzékelni. A fotocella egy üvegbúrába épített anódból és katódból áll. Fény hatására a katódból elektronok lépnek ki, ha a fény energiája nagyobb mint a katód fém elektronjainak szabaddá válásához szükséges munka. Az elektronokat az anódra kapcsolt feszültség vonzza magához.
Hőmérsékletérzékelők: A hőmérséklet érzékelésére a szilárd testek vagy folyadékok hőtágulását, a villamos áramot vezető anyagok ellenállásának a hőmérséklet által okozott megváltozását szokás használni.
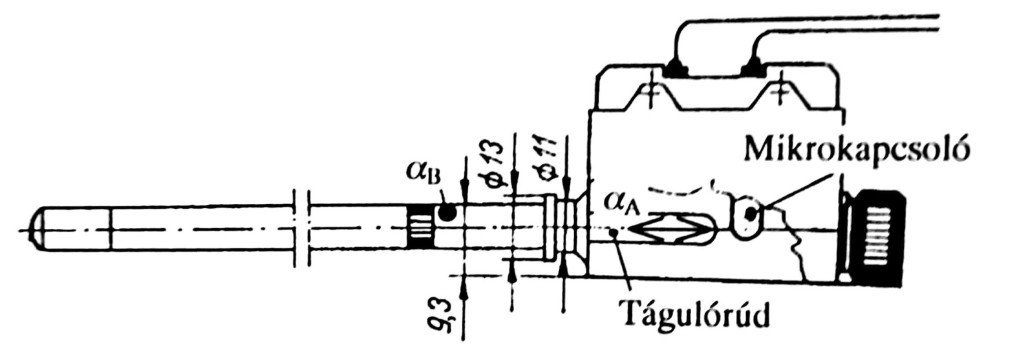
Az anyagok hőtágulását használják fel a tágulórudas és a kettős fém (bimetál) érzékelőknél.
A tágulórudas hőmérők a két fém különböző lineáris hőtágulásának elmozduláskülönbségén alapulnak. A hőmérséklet növekedésével lineárisan nő a hosszkülönbség.
Tágulórudas és bimetál hőmérő
A bimetálnál két különböző lineáris hőtágulású fémcsíkot egymáshoz rögzítenek. A hő hatására a nagyobb hőtágulású fém jobban megnyúlik és a nem rögzített vége a kisebb fém irányába mozdul el.
Az ellenállás változáson alapuló hőmérőknél olyan anyagokat használnak, amelyek ellenállása lineárisan változik a hőmérséklet függvényében.
Nyúlásmérő bélyegek: A test megnyúlásának mérésére szolgál. Egy műanyaglemezkébe ágyazott ellenálláshuzal-rácsból áll. A bélyeget a rugalmas mérőelemre ragasztják fel, úgy hogy a megnyúlása azonos legyen a mérőelemével. Alakváltozáskor deformálódik a nyúlásmérő bélyeg is. A bélyegben levő vezető megnyúlik és csökken a keresztmetszete, ennek következtében nő az ellenállása.
Nyomásérzékelők: A nyomásérzékelők gázok és folyadékok nyomáskülönbségét villamos jellé alakítja. A nyomás mérését rendszerint egy nyomással arányos erő érzékelésére vezetik vissza. Leggyakrabban használt elem a sík membrán.
Elmozdulás és helyzetérzékelők: Mechanikai elmozdulást alakítanak át elektromosan feldolgozható jellé. A kimenő jel lehet állásos (kétállású) vagy folyamatosan változó. Az elektromechanikus helyzetérzékelő valamilyen működtető mechanizmus által mozgatott érintkező kapcsolók. A kapcsolónak mindig van valamilyen, a mozgó érintkezés nyugalmi helyzetben visszaállító eleme.
A Reedcsöves elmozdulásmérőnél a reed érintkezőkre ható erőt befolyásolja az állandó mágnes amely a reedcső hossztengelyének irányába és merőlegesen mozgatható. Kétállású kapcsoló, az elmozdulás 1-10 mm.
Reedcsöves elmozdulásmérő
Az induktív érzékelők a két tekercs közötti mágneses csatolás változásán alapulnak. Az egyik tekercset gerjesztve a másik tekercsben a csatolás mértékétől függő nagyságú feszültség indukálódik. Folytonosan változó kimenő jelet adnak.
A kapacitív érzékelők aktív eleme egy kondenzátor amely egy tárcsa alakú elektródából és egy félig nyitott fegyverzetből áll. A kapacitív töltés kapcsoló a hatósugarában kerülő, a kapacitás megváltoztatását eredményező tárgyakat érzékeli. Nemcsak fémekre, hanem szigetelőanyagokra is kapcsol.
Kapacitás érzékelő
Folyadékszint mérése
Forgásérzékelők: A forgásérzékelő egy tengely körüli elfordulás vagy fordulatszám mérésére alkalmasak. Ugyanazok az elvek alkalmazhatók mint az elmozdulások értékelésekor. A legegyszerűbb elfordulásérzékelő a potenciométer. A potenciométer csúszkája huzalból tekercselt elmozduláson mozog.
Elfordulást- vagy helyzetérzékelés fotoelektromos úton is mérhetünk. A fénysorompó vagy a fényvisszaverődés elvét használják. A fénysorompó elvnél a fény útját valamilyen fényt nem áteresztő anyaggal megszakítjuk. A tükrözési elvnél a fény egy felületről visszaverődik és ezt érzékelni lehet. A tárcsa alapvetően kétféle kialakítású lehet: inkrementális és abszolút.
A fordulatszám-érzékelők egy állandó mágnessel gerjesztett generátorok (tachométer generátor). A fordulatszám növekedésével nő a generátor által előállított feszültség is.
A CAM rendszerben a bemenő adat a tárgy geometriai modellje. Első lépésben definiálni kell a megmunkáláshoz szükséges technológiai eljárásokat. Ezt biztosítja a CAPP modul (Computer Aided Process Planning, számítógéppel segített művelettervezés). A gyártás számítógép segítségével valósul meg. A CAPP az összekötő elem a CAD és CAM között.
A CAPP modulnak három része van:
bejövő geometria
technológia leírása
dokumentáció elkészítése
A CAM rendszer szoftvere tartalmazza a CAPP rendszert és a CNC program elkészítését.
A CAM olyan gyártásirányítási módszerek és szolgáltatások együttese amelyek a termelés végrehajtási (operatív) szintjéhez kapcsolódnak és a CIM gyártás alrendszere. A CIM rendszerben több modul is integrálva van.
CIM rendszer felépítése
MIS – Management information
PPS – Production Planning System
CAQ – Computer Aided quality assurance
A vállalatirányítási rendszernél valamennyi egység egy központi adatbankból dolgozik. Ez lehetővé teszi hogy a tervezést és gyártást függetleníteni lehet attól hogy hol helyezkednek el a világban.
Technológia folyamat modellje:
A hagyományos művelettervezéssel azonos. A folyamat egy alkatrész megmunkálását írja le.
Művelet: A folyamatnak az a szakasza amelynek során a munkadarab azonos szerszámgépen mindvégig változatlan helyzetben van.
Műveletelem: A megmunkálásnak az a része, amelynek során a felületeken egyik térfélben vagy több megmunkálási ciklust valósítanak meg ugyanazzal a szerszámmal.
Megmunkálási ciklus: Szerszámpályák megszakítás nélküli sorozata adott kezdőponttól a végpontig. A szerszám egy geometriai alakot munkál meg.
A CAD rendszerek széleskörű elterjedése magával hozta a felhasználók igényeinek megnövekedését. Ez az igény indukálta a CAD rendszerek továbbfejlesztését, a rendszerek képességeinek kibővítését és több felhasználási területre történő alkalmassá tételét. A jelentkező igények szerint a CAD rendszerek fejlesztése alapvetően három irányban indult meg:
– a rendszer modellezési képességeinek fejlesztése,
– a rendszerbe integrálható szakmodulok fejlesztése,
– a CAD modelleken alapuló számítógépes alkalmazások fejlesztése.
Manapság egy CAD rendszer olyan mértékben bonyolult és összetett, hogy más rendszerekbe integrálása nem valósítható meg. A rendszer lelkét, magját adó szoftver (grafikus kernel) viszont más rendszerekbe is beépülhet. A CAD rendszerek legfontosabb, központi része a grafikus kernel. A grafikus kernel egy szoftver ami a 3D-s objektumok kezelését és megjelenítését végzi. A kernel biztosítja a CAD modulok (csőhálózat tervező, kábelkorbács tervező, szabványos alkatrészek stb.) egymással való kommunikációját.
A grafikus magot hat fő modul alkotja.
grafikus kernel felépítése
A felület és testmodellezés blokknak az elemi felületek, testek létrehozásában van szerepe. A boolen műveletek segítségével lehet testek közötti műveleteket pl. kivágást, közös rész képzést vagy egyesítést stb., végezni. A feature műveletekre a testek élletörése vagy lekerekítése stb., hozható példaként. A grafikus megjelenítő modul biztosítja a 3D-s objektumok megjelenítését. Külön modul kezeli a belső adatokat. A kernel kapcsolatot tart a rendszer többi moduljával, például végeselem modullal, vagy NC modullal, egyéb szakmodulokkal. A geometriai információk különböző formátumokban történő lementését, és más CAD rendszerek által létrehozott formátumokból az adatok kezelését szintén a grafikus kernel végzi.
A számítógépek elterjedésével az élet számos területén a 3D-s adatokat egyre szélesebb körben használják. Olyan területeken is, ahol korábban a rendszerre vonatkozó igény nem jelent meg. Ilyenek például a sebészet, vagy az orvosi diagnosztikai vizsgáló berendezések, de említhetnénk még az antropológia és az archeológia területeit is. Ezeknek az igényeknek a kielégítésére alkalmas szoftverekben, alkalmazásokban már alapkövetelményként jelent meg a 3D-s megjelenítés, adatkezelés. Ennek eredményeképpen jött létre az az üzleti lehetőség, hogy a CAD rendszerek fejlesztésével foglalkozó cégek a felmerült szükséglet kielégítésére a CAD rendszerük magját jelentő grafikus kernelt kereskedelmi célokra felhasználják, és hozzáférhetővé tegyék más fejlesztő cégek számára.
CAD grafikus kernelt használó alkalmazások:
PLM rendszerek vizualizációs moduljai
CNC szoftverek
Formatervező alkalmazások
Szimulációs szoftverek
Adatkonvertáló alkalmazások
A CAD rendszerekbe integrálódott funkciók szerint három szintet lehet megkülönböztetni. Az első az együttműködő alkalmazások szintje, ahol egy CAD rendszer és egy adott feladat elvégzésére alkalmas külső program működik együtt. Példaként egy CAD szoftver és egy külső program együttműködése. A második, a részleges integráció szintje, amikor az adott feladatot, még mindig a CAD rendszertől független szoftver végzi, de a CAD rendszer keretein belül. Például egy mérnöki számításokat végző program és a CAD rendszer integrációjában a számítások elvégzése után az eredmények megjelenítése. A harmadik és egyben legfejlettebb szint, a szakmodulok szintje. Ekkor a funkció teljesen beépül a CAD rendszer kereteibe, környezetébe és a felhasználó egy egységesített formában tudja elérni a szakmodul által nyújtott lehetőségeket.