A céltárgyat vagy munkadarabot a robot a megfogószerkezetével (effektor) fogja meg. Ez gyakran kényes feladat, mert bizonyos tárgyaknál csak korlátozott szorítóerőt lehet alkalmazni. Sok esetben elegendő egyetlen univerzális megfogó kialakítása, de gyakran célszerűbb egy egyszerűbb megoldás alkalmazása. A merev megfogó hátrányait küszöbölik ki a különféle csuklós megfogók, amelyekkel a robot keze vízszintes és függőleges síkban elfordítható úgy, hogy a tárgy a megfogásához szükséges irányból legyen megközelíthető. A csuklószerkezetbe három léptetőmotort építenek be. A felső motor az 1 tengely körül végez forgómozgást. A középső motor a 2 tengely körül billent oly módon, hogy a motor külső háza peremes felfogással a csuklóvázhoz, a tengelye pedig a billenő-kerethez van mereven rögzítve. Az alsó motor a 3 tengely körül forgat. E változat előnye, hogy a léptetőmotorok fordulatszáma tág határok között szabályozható, és szükség szerint megvalósítható az egy lépésen belüli irányváltás. A léptetőmotorok az elmozdulásérzékelőket is helyettesítik.


A tervezők leginkább arra törekednek, hogy olyan megfogókat tervezzenek, amelyek lehetőleg minél több fajta munkadarab megfogását teszik lehetővé. Természetesen az emberi kéz ügyességét reprodukálni képes „robotkéz” kifejlesztése gazdaságilag alig indokolható, annál célszerűbb viszont olyan alapkonstrukciókat szerkeszteni, amelyek cserélhető elemekkel (ujjakkal) megteremtik egy-egy megfogótípus rugalmas használatát.
A mozgatandó tárgy és a megfogó szerkezet kapcsolata alakkal, erővel és tapadással
biztosítható. A tárgyak megfogásánál általában az első két megoldás kombinációját alkalmazzák. A megfogó szerkezet fontos jellemzõje és elõnyös tulajdonsága, hogy a manipulálandó munkadarab halmaz minél szélesebb tartományát képes legyen megfogni. A nyers és a kész (megmunkálás utáni) felületet is lehetőség szerint meg tudja fogni.
Széles megfogási tartomány biztosítható:
– a csuklópontok állíthatóságával
– a megfogó ujj betétek (pofák) cseréjével
– a megfogó ujjak cseréjével
– univerzális megfogó szerkezettel
Az ipari robotok megfogószerkezeteinek leggyakoribb típusai:
- megfogók merev ujjakkal
- vákuumos megfogók
- mágneses megfogók
- megfogó célkészülékek
- megfogók rugalmas ujjakkal
- érzékelőkkel felszerelt megfogók
Megfogó merev ujjakkal. A megfogószerkezetek zöme ebbe a csoportba tartozik. Általában két merev ujj végzi a megfogást, néhány változatban csak az egyik ujj mozog, de szerkezeti okok miatt gyakoribb a két ujj együttes, tükörképszerű mozgatása. A csuklós szerkezet lehet hidraulikus, pneumatikus, villamos működtetésű vagy rugalmas szorítású.

Alakzáró megfogás.

Mechanikus megfogó szerkezetek.


A vákuumos megfogó meglehetősen közismert: gumiból vagy műanyagból készült tapadókorongok , vagy a feladathoz illeszkedő profilú „szippancsok”. Előnye, hogy könnyű, egyszerű, és az aktív erőt az igénybe vett felületen jól elosztja. Különösen célszerű és elterjedt azokon a területeken, ahol sérülékeny, törékeny tárgyakat kell mozgatni.


A mágneses megfogóban elektromágnes vagy állandó mágnes helyettesíti a tapadókorongot, és vákuum helyett a szükséges erőhatást mágneses erő adja. Állandó mágnest ritkán alkalmaznak, mert a megfogott tárgyat a mozgatás befejezésekor külső erő segítségével kell leválasztani a megfogóról.

Megfogó célkészülék. Számos robotkéz alapmodellje viszonylag egyszerűen átalakítható szerszámok és készülékek kezelésére. (hegesztőkészülék, gázégőfej, műanyag vagy festékszóró készülék, mérőkészülék)

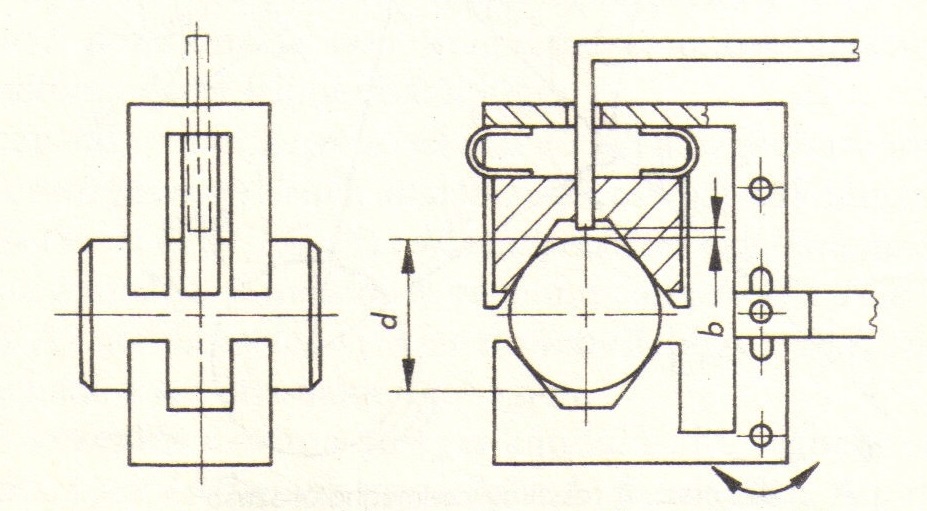
Vannak kettős feladatot ellátó megfogókészülékek is. pl.: A robot megfogószerkezete a rúd megfogásakor egyidejűleg a rúd átmérőjét is méri.
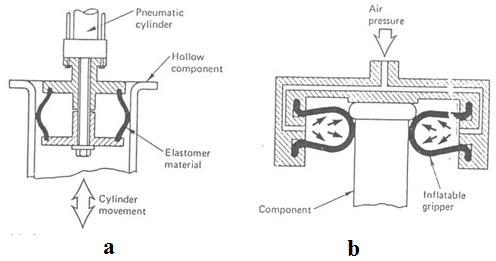
Megfogók rugalmas ujjakkal. A megfogáskor működésbe lépő szorítóerő szabályozásának egyik módja a pneumatikus mozgatás, amikor is a szorítóerőt egy nyomásszabályozóval egyszerűen be lehet állítani. A másik, még egyszerűbb módszer, ha nem merev, hanem rugalmas vagy jobb erőelosztást adó ujjakkal szerelik a robotot.
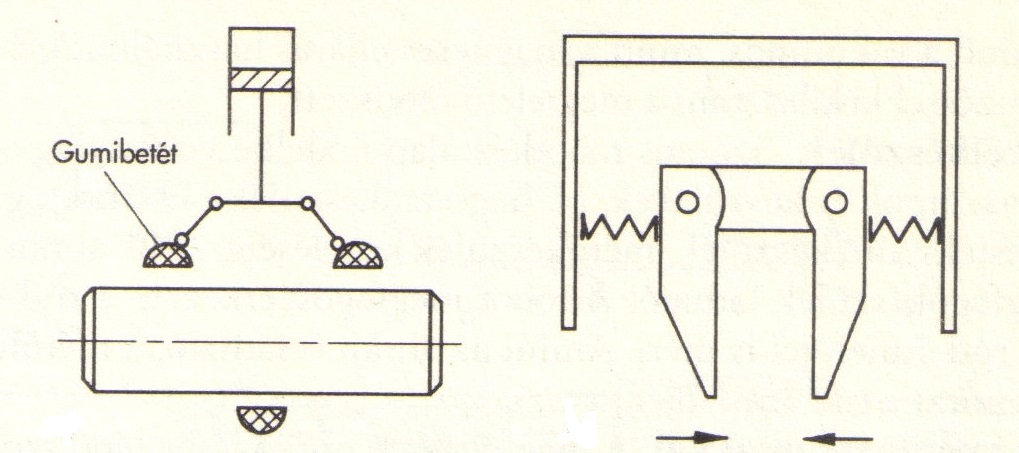
A megfogó merev ujjai rugózó kerethez kapcsolódnak, ezzel a robot helyezési pontatlansága kiküszöbölhető.
Érzékelőkkel felszerelt megfogó. Ha a robotoknak érzékelőberendezésük van, visszacsatoló vezérlésiszabályozási körökkel, valamint a vezérlőberendezéseket ellátták érzékelőket kiszolgáló szoftverrel, akkor emberi felügyeletre alig van szükség. Ez természetesen jóval bonyolultabb feladat mert az érzékelendő jelenségek köre, kiértékelésének módszere, a szükséges érzékelési pontosság és még számos egyéb jellemző alkalmazási területenként változik. A robotok alkalmazása során gyakori igény annak érzékelése, hogy az adott tárgy az ujjakkal megfogható-e, a végrehajtott megfogás elég szilárd-e, a szorítóerő pedig a megadott határokon belül van-e.
A fizikai jellemzők gyakran egyszerű mechanikus, villamos vagy pneumatikus érzékelőkkel megállapíthatók, pl. erő-, nyomatékérzékelők fúvókák, mikrokapcsolók stb. segítségével. Komolyabb nehézséget jelent viszont a vizuális érzékelés és azonosítás, bizonyos területeken a hőmérséklet, a mozgásállapot, a sebesség, a gyorsulás, az anyag- és felületi jellemzők érzékelése.
Felhasznált irodalom:
- Hervay Péter: Gyártórendszerek a gépiparban
- Ipari robotok megfogószerkezetei: https://docplayer.hu/18861982-Ipari-robotok-megfogo-szerkezetei.html