A léptetőmotorok olyan egyenárammal működő gépek, amelyek, az eddig tárgyalt, folyamatos forgású motorokkal szemben, diszkrét szögelfordulás megtételére képesek.
A léptetőmotorok szerkezete
A gép állórésze kiálló pólusú vasmag, a pólusokon gerjesztőtekercseléssel. A pólusok száma 2 és 10 közötti. A kerület mentén szimmetrikusan elhelyezkedő pólusok közül a szemben lévők soros kapcsolásúak. Egy póluspárt szokás egy fázisnak is nevezni. (Egy tízpólusú állórész eszerint ötfázisú.)
A gép forgórésze lehet
ún. aktív forgórész, amely állandó mágnesű, alakja szerint hengeres vagy kiálló pólusú;
ún. passzív forgórész, amely gerjesztetlen lágyvas és minden esetben kiálló pólusú. Az állórész és forgórész pólusainak száma különböző.
A léptetőmotorok működési elve
Egy állandó mágnesű, kétfázisú, kétpólusú forgórészú léptetőmotor elvi vázlatát mutatja az ábra. Az a) ábra szerint a gerjesztő egyenáram az 1-1’ jelzésű pólustekercsekre kapcsolódik. Ennek következtében a forgórész, az ellentétes mágneses pólusok közötti vonzó hatásra az a) ábra szerinti helyzetbe áll és mindaddig ott marad, amíg a gerjesztés változatlan. A forgórész az óramutató járásával ellentétes irányban 90°-ot elfordul, ha a gerjesztő-egyenáramot, a b) ábra szerinti polaritással átkapcsolják a 2-2′ pólustekercsekre. Ekkor a forgórész egy lépést tett meg. A további, azonos elfordulási irányú, léptetéshez a c), ill. d) ábra szerint kell a gerjesztést a pólusokra kapcsolni. A léptetés az a) ábrából kiindulva ellentétes irányú, ha a 2-2′ pontokra fordított polaritással, a d) ábrának megfelelően kapcsolják a gerjesztést.
Nagyobb állórész-fázisszám és forgórész-pólusszám esetén a lépésszög is kisebb. A lépésszög- bizonyíthatóan a következő összefüggésből számítható:
Speciális szerkezeti kialakítással a lépésszög 1° körüli értékre csökkenthető. A gerjesztőáram csatlakoztatása, ill. átkapcsolása nem mechanikus működésű kapcsolókkal, hanem tranzisztorokkal történik.
A tápegység a léptetőmotor gerjesztőegyenáramát szolgáltatja. A gerjesztőfeszültség 10 V, a gerjesztőáram 1 A nagyságrendű szokott lenni, amelyet a megfelelő pontokra megfelelő polaritással a tranzisztorok kapcsolnak. A digitális léptető logikai áramkör vezérli a tranzisztorokat. Itt állítható be a lépésirány is. Az impulzusgenerátor által kibocsátott minden impulzusra a motor egyet lép. A motor megtett lépéseit az impulzusok száma, a léptetés sebességét a vezérlő impulzusok frekvenciája határozza meg.
Egy adott gépet nem lehet tetszőleges gyorsasággal működtetni, mert egy meghatározott léptetési frekvencia fölött a motor már nem képes mozgásával követni (a tömeg-tehetetlenség következtében) a gyors változást. Ilyenkor lépéskihagyás keletkezik, ill. a motor leáll. A hiba nélküli működés legnagyobb frekvenciáját a határfrekvencia jellemzi, ami néhány kHz lehet. A léptetőmotorok vezérléséhez gyakran alkalmaznak számítógépet, ami lehetővé teszi a motor tárolt programú irányítását. A léptetőmotoros hajtás előnye, hogy visszacsatolás nélküli, pontos helyzetbeállítást tesz lehetővé.
Alkalmazási területei: kis teljesítményű szerszámgépek, robotok, plotterek, nyomtatók stb.
Az aszinkron – másik nevükön indukciós-gépek lehetnek generátorok és motorok A gyakorlat számára a motorok a jelentősebbek. A működő motorok legnagyobb részét az aszinkrongépek teszik ki. Ennek oka az egyszerű szerkezet, az ebből következő üzembiztonság, kis karbantartási igény és a viszonylagos olcsóság. Aszinkronmotorokat 1 W-tól 1 MW teljesítményig.
Háromfázisú aszinkron motor
A szerkezet fő részei az állórész és a forgórész. Az állórész szerkezete lényegében megegyezik a szinkrongép állórészével. Az állórészház kis teljesítmények esetén (1-2 kW-ig) legtöbbször aluminiumöntvény, nagyobb gépeknél öntöttvas, ill. hegesztett acélszerkezet. A házban helyezkedik el az egymástól elszigetelt dinamólemezekből épített, hornyolt vasmag. A hornyokban elhelyezkedő háromfázisú tekercselésnek általában mind a hat végét kivezetik az állórészen lévő, csavarokkal lezárt kapocsházba. A szigetelő anyagú kapocstáblán a tekercskivezetésekhez csavarkötéssel lehet csatlakoztatni a hálózatot.
A forgórész két változatát különböztetjük meg: a csúszógyűrűs (más néven tekercselt) és a kalitkás (más néven rövidrezárt) forgórészt. A két típus szerkezetében közös a tengelyen lévő, dinamólemezből készült, hengeres vasmag, a teljes kerületén, egyenletesen elosztott hornyokkal. Csúszógyűrűs forgórész esetén a vasmag hornyaiban szigetelt rézvezetőből készült, háromfázisú tekercselés van. A tekercselés három kivezetése a tengelyre szerelt, a tengelytől és egymástól is elszigetelt, három bronz csúszógyűrűhöz csatlakozik. Összeszerelt gépeknél a csúszógyűrűkhöz szénkefék csatlakoznak. A kefék három kivezetése külön kapocsházban található. Tartós üzemelésű gépek esetén találkozhatunk ún. kefeemelő és a csúszógyűrűket a tengelyen közvetlenül rövidre záró szerkezettel. Ennek hatására üzemelés közben sem a kefék, sem a csúszógyűrűk nem kopnak. Csúszógyűrűs forgórészű gépet általában 10kW teljesítmény alatt nem készítenek.
Kalitkás forgórész esetén a vasmag hornyaiba egy-egy szigeteletlen, viszonylag nagy keresztmetszetű vezető (rúd) kerül. A rudak a vasmag két végén ún. rövidre záró gyűrűkhöz csatlakoznak. Az így kialakított szerkezetet nevezzük kalickának. A kétkalitkás és a mélyhornyú megoldások célja a motorok indítónyomatékának növelése. A kalitkát kb. 10 kW teljesítményig alumíniumöntéssel készítik. Ugyanakkor alakítják ki a rövidrezáró gyűrűket is. Zárt gépek esetén a gyűrűkhöz (a levegőt keverő) lapátkákat is öntenek. Ez az eljárás tömeggyártásra alkalmas technológia. Nagyobb teljesítmények esetén a hornyokba rézből készült rudakat tolnak és ezeket keményforrasztással a réz rövidrezáró gyűrűkhöz kötik. Kalitkás forgórészű gépeket 100 kW teljesítménynagyságrendig készítenek. A kalitkás gépek olcsóbbak és üzembiztosabbak a csúszógyűrűs motoroknál.
Az aszinkronmotorok általában léghűtésűek. A hűtőlevegőt, ritka kivételtől el tekintve a tengelyre szerelt ventilátorkerék áramoltatja:
átszellőzött gépeknél a gép belsején keresztül,
zárt gépek esetén az állórész felületén.
Három fázisú aszinkron motor működése
Az állórészre kapcsolt U1 feszültség hatására folyó I1 háromfázisú áram forgó mágneses teret létesit, amely a fázissorrend által meghatározott irányba, n1 szinkronfordulatszámmal forog. Fordulatszámát most is a hálózati frekvencia és a motor állórésztekercsének póluspárszáma határozza meg. A forgó mágneses tér (a mozgási indukció alapján) a forgórész vezetőiben U₂ feszültséget indukál. Ha a forgórész zárt áramkörű az indukált feszültség I2 áramot létesit. Ebből adódik az indukciós motor elnevezés. Az indukált áram az állórész fluxusával erőhatást, nyomatékot hoz létre, amely az állórész mágneses terével egyező irányba hat. A nyomaték következtében a gép forgórésze forgásba jön. A nyomaték hatására a motor fordulatszáma szükségszerűen kisebb a szinkronfordulatszámnál. Ha a fordulatszám elérné a szinkronfordulatszám értékét, megszünne az indukáló hatás és így a nyomaték is, tehát a forgórész lassulna. Ekkor kialakulna a fordulatszámegyenlőtlenség. (A szinkronnál nagyobb fordulatszámmal sem működhet a motor. Ekkor ugyan indukálódna áram, de a keletkező erő fékezné a forgást, megszüntetni igyekezvén az indukáló hatást.) Az aszinkronmotor egyik legjellemzőbb tulajdonsága, hogy csak szinkronnál kisebb fordulatszámmal képes üzemelni. Ebből adódik a gép aszinkron elnevezése. A szinkron fordulatszámtól való eltérést a szlippel (csúszás) jellemezzük. A szlip megmutatja, hogy a motor tényleges fordulatszáma hány százalékkal tér el a szinkronfordulatszámtól. Az általánosan használt motorok szlipje névleges terhelésen 1-10%. A nagyobb teljesítményű gépek szlipje az alsó határ közelébe, az 1-100 W nagyságrendűeké pedig a 10% közelébe esik. A szlip jellemző átlagértéke 4% körüli. A motorok fordulatszáma üresjáratban igen jól megközelíti a szinkronfordulatszámot. A motorok fordulatszáma az üresjárat és a névleges terhelés között néhány százalékot változik.
Aszinkron motor jelleggörbéi
A jelleggörbe jellegzetes pontjai és a motorok tulajdonságai a jelleggörbe alapján:
Indítónyomaték (M): a névleges nyomaték körüli, vagy annál kisebb. Ennek oka, hogy álló helyzetben a forgórész erősen induktív jellegű, a forgórész fázistényezője kicsi és emiatt a nyomaték is kicsi. A motor akkor tud forgásba jönni, ha az indítónyomaték nagyobb az M, terhelőnyomatéknál, ahogy az ábra mutatja.
Billenőnyomaték (M): a motor gyorsulása közben a nyomatéka a billenő nyomatékig nő. A nyomaték azért növekszik, mert a fordulatszám növekedésével csökken a szlip, így csökken a forgórész f frekvenciája. A csökkenő frekvencián kisebb lesz a forgórész induktív ellenállása, ezáltal növekszik a slip, fázistényező. A nagyobb fázistényező növekvő nyomatékot eredményez. A billenőnyomatékhoz tartozó szlip kb. 15-20%, tehát ekkor a fordulat szám a szinkronértéknek kb. 80-85%-a.
Névleges nyomaték (M): a billenőnyomaték utáni gyorsulás folyamán a nyomaték meredeken csökken. A csökkenés oka: a fázistényező már csak keveset növekszik, de a forgórész árama tovább csökken, mivel az indukált feszültség a szlip csökkenése miatt egyre kisebb lesz. A névleges nyomaték ennek a meredek szakasznak kb. a közepén található.
A motor addig gyorsul, amíg a nyomatéka egyenlő nem lesz a terhelés nyomatékával (a két jelleggörbe metszéspontja). Ha a gép üresjárásban van, akkor felgyorsul az nt, szinkronfordulatszám közvet len közelébe. A nyomatéki görbe a szinkronfordulatszámnál metszi a vízszintes tengelyt. A nyomaték jelleggörbéjéből is kiolvashatóan üresjárás és névleges terhelés között a motor fordulatszáma néhány százalékot változik. Stabil motoros üzemet az üresjárási pont és a billenőnyomaték között lehet meg valósítani. Ha a terhelés meghaladja a billenőnyomatékot, akkor a motor hirtelen megáll, a névlegest többszörösen meghaladó hálózati áramfelvétel kíséretében. Ez a nagy áram, ha tartósan fennmarad, veszélyezteti a motor épségét.
Aszinkron motorok veszteségei és hatásfoka
A hálózatból felvett teljesítmény egy része a motorban veszteségként jelentkezik. A fellépő veszteségek és teljesítményviszonyok:
Az állórész vasvesztesége: jó közelítéssel, a terheléstól függetlenül állandó. Az állórész tekercasvesztesége: a hálózatból felvett áramtól függ.
A forgórész vasvesztesége (ami frekvenciafüggő) forgás közben elhanyagolható, mert a forgórész frekvenciája néhány Hz. A mechanikai veszteség: csapágy- és kefesúrlódásból, valamint a szellőzési veszteségből (a hűtőlevegő áramoltatásához szükséges teljesítmény) áll. A mechanikai veszteségek a terheléstől függetlenül állandóak, mivel a fordulatszám gyakorlatilag nem változik, a mechanikai veszteségek a névleges teljesítmény 1-2 százalékára tehetők. A forgórész tekercsvesztesége is teljesítmény függő.
Névleges teljesítménynél, az aszinkrongépek hatásfoka 70-90%. A nagy teljesítményű gépek hatásfoka a magasabb értékű. A teljesítménytényező névleges értéke 0,7-0,92 közé esik. A legnagyobb érték a nagyteljesítményű gépekre jellemző.
Egyfázisú aszinkronmotor
Olyan helyeken, ahol nem áll rendelkezésre a háromfázisú hálózat, de az aszinkronmotor kedvező tulajdonságai (egyszerú, üzembiztos szerkezet, kis karbantartási igény) jól hasznosíthatók, egyfázisú gépet alkalmaznak. Jellegzetes felhasználási területük a háztartásokban található, villamos hajtású berendezések (mosógépek, kompresszoros hűtőgépek, szivattyúk, fűnyírók stb.). Az egyfázisú aszinkrongépek teljesítménye általában nem nagyobb 1,5-2 kW-nál. A kis teljesítmény miatt az egyfázisú gépek egykalitkás forgórésszel készülnek és az állórész-tekercselés kivételével szerkezetileg megegyeznek a háromfázisú motorokkal. Az állórész tekercselése kétfázisú. Ez azt jelenti, hogy a két fázistekercs mágneses tengelyei 90°-os villamos szöget zárnak be. A két tekercs egyikét főfázisnak, a másikat segédfázisnak nevezik.
Annak érdekében, hogy a motornak legyen indítónyomatéka, már álló állapotban forgó mágneses teret kell a gépben létrehozni. Ezért készítik a gépet segédfázissal. A segédfázissal kondenzátort kapcsolnak sorba, hogy áramát a főfázis áramához viszonyítva fázisban eltolják. A fő- és segédfázist párhuzamosan kapcsolják az egyfázisú hálózatra. Mivel a felgyorsulás után a gép már a főfázissal is üzemképes, működtetnek motorokat úgy is, hogy a segédfázist csak az indítás idejére kapcsolják be. A segédfázis be- és kikapcsolását az indítóberendezés automatikusan végzi.
Az egyfázisú motor hátrányai:
Azonos teljesítmény esetén nagyobb méretű, mint a háromfázisú gép, ebből következően nagyobb tömegű, nagyobb helyigényű és költségesebb.
A háromfázisú gépnél rosszabb a hatásfoka.
A segédberendezések (kondenzátor, áramrelé) miatt a háromfázisú motornál kevésbé üzembiztos.
A szinkrongépek (generátorok és motorok olyan villamos forgógépek, amelyeknek az álló) és forgórészében létrejött mágneses terek azonos fordulatszámmal együtt mozognak, szinkronban vannak. (A görög szinkrón szó egyidejűséget jelent.) A gyakorlat szempontjából főleg a szinkrongenerátorok nagy jelentőségűek, mert az ipari méretű villamosenergia-termelés kizárólagosan ezekkel történik.
Szinkronmotorok szerkezete
A gép fő szerkezeti egységei az állórész és a forgórész. Az állórész legfontosabb alkotóelemei a ház, a vasmag és a tekercselés. A ház kis és közepes teljesítményű gépek esetén öntöttvas, nagyobb gépeknél hegesztett acélszerkezet.
A vasmag cső alakú, egymástól elszigetelt ún. dinamólemezből készül. (A dinamólemez 2-3% szilíciummal ötvözött, 0,35-0,5 mm vastag lágyvaslemez). A vasmag belső palástja mentén egyenletes osztással hornyolt. A hornyok száma nagyobb gépeknél százas nagyságrendű is lehet. A hornyokba kerül a tekercselés. A tekercselés szigetelt rézvezetőből készül, általában háromfázisú, ritkán egy fázisú.
A forgórész egyenárammal gerjesztett elektromágnes. Alakja szerint lehet hengeres és kiálló pólusú.
A hengeres forgórész vasmagja henger alakú. Közepes teljesítményig lemezelt, nagy teljesítmények esetén tömör acélhengerből áll. A hengerpalást egy részén kialakított hornyokban helyezik el a gerjesztőtekercselést, amely szigetelt rézvezetőből készül. A gerjesztőtekercs két vége a tengelyre szerelt ún. csúszógyűrűkhöz csatlakozik. A csúszógyűrűk egymástól és a tengelytől elszigetelt, bronzból készült, mozgó érintkezők. Összeszerelt gépnél a csúszógyűrűk palástjára csatlakoznak a rendszerint réztartalmú szénkefék, amelyeken keresztül vezetik be a gerjesztő egyenáramot. A forgórészt gyakran készítik ún. csillapító kalitkával.
A forgórész vasmagjában, a gerjesztő tekercstől elkülönülő hornyokban, hornyonként egy szigeteletlen rézrudat helyeznek, és ezeket a vastest két végén egy-egy rézgyűrűvel rövidre zárják. A kalitka a terhelésváltozás okozta lengéseket csillapítja. A tengelyen elhelyezkedő acélkoszorúra szerelik fel a pólusokat, amelyek törzsén helyezkednek el a gerjesztőtekercsek. A pólusok tekercseit általában sorba kapcsolják úgy, hogy a pólusok polaritása váltakozva északi-déli legyen. A póluspárok száma legalább három. A gerjesztőtekercsek kivezetései itt is csúszógyűrűkhöz csatlakoznak. A csillapító kalitkát a pólussarokban kiképzett hornyokban szokták kialakítani.
Az összeszerelt gép forgórészét csapágyazzák, 100 KVA teljesítményig gördülőcsapágyat, nagyobb teljesítményeknél siklócsapágyat alkalmaznak.
A gépek hűtési rendszere lehet: léghűtésű, 50-60 MVA teljesítményig, hidrogénhűtésű nagyobb teljesítményeknél és folyadékhűtésű 1000 MVA teljesítmény körül.
A motor üzemvitelében nagy jelentősége van a forgórészen kialakított kalitkának. A lengések csillapításán kívül az indításnál van nagy jelentősége, ezért a szinkron motorok forgórészét mindig kalitkával készítik. Kis teljesítmények esetén (100 W-ig) készítenek állandó mágneses forgórészű motorokat, ill. kiálló pólusú, gerjesztőtekercs nélküli, lágyvas forgórészú gépeket, ún. reluktanciamotorokat. Ugyancsak kis teljesítményű gépek készülnek egyfázisú kivitelben is.
Szinkronmotorok működése
A szinkronmotorok működési elve a mágneses pólusuk kölcsönhatásán alapszik. A két mágnes legyen egymástól függetlenül csapágyazva! Ha a külső mágnest elforgatjuk, akkor a belső mágnes a pólusok közötti vonzó hatás miatt követi a külső mágnest. Ez az elrendezés a szinkronmotor működési modellje.
Az állórész tekercseire kapcsolt háromfázisú árammal hozzuk létre a forgó mágneses teret, amelynek pólusai vonzó hatást fejtenek ki a gerjesztett forgórész ellentétes pólusaira, és így jön létre a motor forgása. A gép forgásirányát, az előbbiekből következően, az állórész mágneses terének mozgásiránya határozza meg. Ezért forgásirányváltást az állórészhez csatlakozó, tetszőleges két fázis felcserélésével lehet megvalósítani. A működési elvből következően a motor fordulatszáma megegyezik az állórész mágneses terének fordulatszámával.
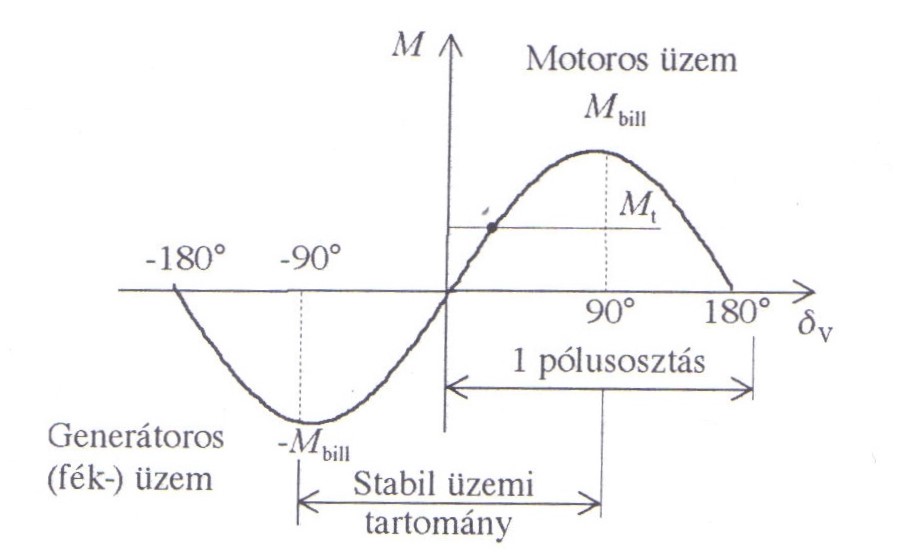
Ahhoz, hogy a motor forogni tudjon, nyomatékot kell kifejtenie. Ha az álló- és forgórész mágneses tengelyei egybe esnek, akkor a pólusok közötti erőhatás tisztán sugárirányú. Ennek hatására nyomaték nem keletkezik, mert az erőnek nincs érintőirányú összetevője. Ebből következik, hogy a motor működése közben az álló- és forgórész mágneses tengelyeinek szöget kell bezárniuk. Ekkor az erőnek az érintőirányú összetevője nyomatékot létesít, amely egyensúlyt tart a terhelőnyomatékkal. A forgórész mágneses tere δ szöggel lemarad az állórész mágneses teréhez képest, de fordulatszáma nem változik. A δ szöget terhelési szögnek nevezzük. A szinkronmotor fontos jellemzője, hogy fordulatszáma a lehetséges üzemi tartományon belül – a terhelőnyomaték értékétől függetlenül állandó. A terhelőnyomaték a terhelési szöget befolyásolja. Növekvő nyomaték nagyobb terhelési szöget eredményez. Ennek hatására, bizonyíthatóan, megnövekszik a motor állórészének áramfelvétele, aminek következtében megnő a pólusok közötti kölcsönhatás, tehát a motor nyomatéka is. A terhelési szög addig változik, amíg a motor nyomatéka egyensúlyba nem kerül a terheléssel. Ez az állandósult állapot feltétele. A motor legnagyobb nyomatékát billenőnyomatéknak nevezzük, és ez akkor lép fel, ha a terhelési szög fél pólusosztásnak megfelelő. Ha túlterhelés következtében a terhelőnyomaték meghaladja a billenőnyomatékot, a motor hirtelen lefékeződik, megáll, kiesik a szinkronizmusból. Ilyenkor a gép állórészének áramfelvétele a névleges áramerősség sokszorosa lesz, ami leégetheti a tekercselést. Stabil motoros üzemet csak a billenőnyomatékig terjedő tartományban lehet fenntartani. A vonatkozó szabványok szerint a motornak a szinkronizmusból való kiesés nélkül el kell viselnie a névleges nyomaték másfélszeresének megfelelő túlterhelést.
Szinkronmotorok alkalmazása
Szinkronmotort ott alkalmaznak, ahol állandó fordulatszámú hajtásra van szükség és az indítónyomatékszükséglet viszonylag nem nagy. A gép fordulatszáma nem függ a terheléstől, csak a kb. 1%-on belül állandó hálózati frekvenciától, így megtakarítható a fordulatszámszabályozó berendezés. Speciális igényeket leszámítva nem érdemes szinkronmotort alkalmazni, mert az aszinkrongépek olcsóbbak, üzembiztosabbak és az üzemvitelük is egyszerűbb.
Az egyenáramú motor működése a mágnes pólusai között elhelyezkedő, csapágyazott tengelyre szerelt, árammal átjárt tekercsre ható erőn alapul. Ha áram folyik a tekercsben, akkor a forgórészen két erőből álló erőpár keletkezik, aminek hatására a tekercs elfordul. Ha változatlan marad az áramirány, akkor folyamatos forgás nem jöhet létre. Ahhoz, hogy a forgató nyomaték iránya változatlan legyen, a tekercsben folyó áram irányának félfordulaton ként ellentétes irányúra kell a tekercsben változnia. Ha a tekercsbe kommutátoron keresztül vezetjük az áramot, amelyhez a semleges vonalban csatlakoznak a kefék, akkor az áram iránya fél fordulatonként megváltozik. Mivel a kommutátor együtt forog a tekerccsel, ezért a felül lévő tekercsoldal mindig az energiaforrás pozitív pólusához, az alsó tekercsoldal pedig mindig a negatív pólushoz csatlakozik. Így a tekercsben váltakozó irányú áram folyik. A kommutátor egyenáramból váltakozó áramot állít elő, azaz váltóirányítóként működik.
Egyenáramú motor működési elve
A valóságos motorok forgórészében a kerület mentén sok tekercselemet helyeznek el, igy a forgórésznek nem lesz holtpontja és a kefék nem zárják rövidre az energiaforrást. Akkor alakul ki holtpont, amikor a tekercs síkja merőleges az erővonalakra. Ekkor a kefék összekötik a két félgyűrűt, tehát zárlatot okoznak. A motor forgásiránya ellentétesre változik, ha a mágnes pólusai felcserélődnek, vagy az U kapocsfeszültség polaritása ellentétes lesz.
Egyenáramú motorok szerkezete
Az egyenáramú gépek (mint minden forgó villamos gép) két fő szerkezeti része az állórész és a forgórész. Az öntöttvasból vagy öntött acélból, esetleg acéllemezből készült ház belső palástjára csavarozzák a főpólusokat és a segédpólusokat. (Segédpólusokat általában néhány 100 W teljesítményig nem készítenek. A segédpólus feladata a kefeszikrázás megszüntetése.) A főpólusok vasmagját technológiai okokból lemezekből szegecselik össze. A segédpólusok tömör acélhasábok, rácsavarozott pólussarukkal. A póluspárok száma 1, 2, 3 vagy 4 és a teljesítménnyel növekszik. A főpólusok a kerület mentén egyenletes szögosztással váltakozva északi ill. déli polaritással helyezkednek el. A segédpólusok a főpólusok közötti szögfelezőben helyezkednek el.
Motorokat néhány kW teljesitményig allando mágnesű fópólusokkal is készítenek.
A forgórész (másképpen armatúra) tengelyén hengeres, szigetelt dinamólemezekből felépített vastest helyezkedik el. A vastest palástja mentén, egyenletes osztással hornyokat sajtolnak. A hornyokban van a szigetelt rézvezetőből készült tekercselés. A tengelyre rögzítik a kommutátort, amely sok, egymástól és a tengelytől elszigetelt szegmensből áll. A szegmensek száma kis gépeknél is tízes nagyságrendű, nagy gépek esetén néhány száz is lehet. A körgyürücikk alakú szegmensek rézböl készül nek. A tekercselemek végeit a kommutátorszegmensek tekercsek felőli végeihez csatlakoztatják, rendszerint lágyforrasztással.
Az egyenáramú gépek általában léghűtésűek. A hűtőlevegőt rendszerint a gép tengelyére szerelt ventilátorlapátkerék áramoltatja. Az olyan motorokat, amelyek fordulatszáma üzemszerűen a névlegesnél jóval kisebb is lehet és így nem lenne elég intenzív a légáramlás, külön motorral hajtott ventilátorral hűtik. Ezt a külső szellőzőt ráépítik az egyenáramú gépre.
Az egyenáramú motor nyomatékát a mágneses térbe helyezett áramjárta vezetőkeretre ható erőpár hozza létre. Az egyenáramú motorok nyomatéka egyenesen arányos a főpólusok mágneses fluxusával és a forgórész áramerősségével.
Egyenáramú motorok fajtái
Az egyenáramú motorokat aszerint különböztetik meg, hogy a főpólusok mágneses tere milyen módon keletkezik. A motorok fajtái a következők:
állandó mágnesű motor: fópólusai állandó mágnesből készülnek.
külső gerjesztésű motor: a főpólusok gerjesztése és a forgórész táplálása külön energiaforrásról történik,
párhuzamos gerjesztésű motor: a főpólusok gerjesztőtekercse a forgórészszel párhuzamosan kapcsolódik,
soros gerjesztésű motor: a főpólusok tekercsét a forgórésszel szorosan kapcsolják.
vegyes gerjesztésű motor: a főpólusokon párhuzamos és soros soros kapcsolású tekercs is található.
Egyenáramú motorok fordulatszámának változtatása
A fordulatszám változtatása a kapocsfeszültséggel: A kapocsfeszültség növelésével a névleges fölé is emelhető a fordulatszám. A feszültség növelésének határt szab azonban a kommutátorszegmensek között fellépő feszültség megengedett értéke, ami a gép teljesítményétől függően nem lehet több 30-50 V-nál. Efölött a szegmensek között átütés és zárlat keletkezhet. A módszer előnye, hogy a gép fordulatszámát tág határok között, elvileg fokozatmentesen lehet változtatni, többletveszteség nélkül.
A fordulatszám változtatása soros ellenállással: hogy ha a motor forgórészével ellenállást kapcsolunk sorba, a gép fordulatszáma csökken. Ebből következik hogy növekvő ellenállás esetén a fordulatszám egyre kisebb lesz. A módszer hátrányai: a névlegeshez képest a fordulatszámot csak csökkenteni lehet, a beiktatott ellenálláson jelentős többletveszteség keletkezik. erősen terhelésfüggővé válik a motor fordulatszáma, mert a feszültségesés függ az áramerősségtől is.
A fordulatszám változtatása a fluxussal: Ez a módszer csak gerjesztett főpólusú gépeknél alkalmazható. A pólusok telítődése miatt ésszerű és megengedhető gerjesztőáramok mellett a fluxus csak kis mértékben növelhető a névleges állapothoz képest. Ezért ez a módszer fordulatszám csökkentésre kevésbé alkalmas. A fluxus csökkentése (más néven mezőgyengítés) nem ütközik akadályokba, a gerjesztőáram csökkentésével a fordulatszám jelentősen növelhető.
Összefoglalva megállapítható, hogy az egyenáramú motorok fordulatszáma tág határok között és folyamatosan, egyszerűbben változtatható, mint a szinkron vagy aszinkrongépeké. Ha egy gépet több, egyforma motor hajt (pl. városi villamosok. dízel-villamos mozdonyok) a fordulatszám változtatásának módja lehet a motorok soros, ill. pár huzamos kapcsolása. (Soros kapcsolásnál egy motorra kisebb feszültség jut mint párhuzamos kapcsolás esetén.) A módszer veszteségmentes fordulatszám-változtatást tesz lehetővé.
Az egyenáramú gépek veszteségei, hatásfoka
Az egyenáramú gépekben fellépő veszteségek a következőképpen csoportosíthatók:
Vasveszteség: döntően a forgórész vasmagjában, kisebb részben a pólussarukban keletkezik a forgás okozta fluxusváltozás hatására. A vasveszteség erősen fordulatszámfüggő, mivel a fluxusváltozás is az.
Forgórész-tekercsveszteség: a forgórész árama a tekercsek ellenállásán kelti. Ez a veszteség a forgórész-áramerősség négyzetével arányos.
Gerjesztési veszteség: a fő- és segédpólusok gerjesztő tekercseiben, ill. az esetleges kompenzáló tekercsen hővé alakuló teljesítmény. A forgórésszel sorosan kapcsolt tekercsek vesztesége terhelésfüggő, és szintén a forgórészáram négyzetével arányos. A párhuzamos gerjesztőtekercsek vesztesége nem függ a terheléstől. A gerjesztési veszteségbe számítják a gerjesztó-tekercsekkel sorosan kapcsolt gerjesztő-ellenállások veszteségét is.
A kefék veszteségei: az átfolyó forgórészáram a keféken feszültségesést létesít, amely a keféken veszteséget okoz. A gyakorlati tapasztalatok szerint az ún. szénkefék feszültségesése, a terheléstől függetlenül kb. 2 V, így a kefék vesztesége igen jó közelítéssel egyenesen arányos a forgórész áramával. A réztartalmú kefék feszültségesése kb. 0,6 V, így a fellépő veszteség is kisebb.
Mechanikai veszteségek: ide soroljuk a csapágy- és kefesúrlódási, valamint a szellőzési veszteséget. Ha a gépet külső szellőzőmotor hűti, akkor annak a felvett teljesítményét is ide számítják. A mechanikai veszteségek fordulatszámfüggőek.